

- Цена: 79.99$
Перед обзором хочу сказать что Asgard32 находится в публичном тестировании вследствие чего в будущем возможны некие изменения(которые уже были замечены, но о всём по порядку.)
Уверен у 99% людей в голове возник вопрос, а что же такое собственно Asgard? Постараюсь в кратце ответить на этот вопрос.
Asgard это мозг для квадрокоптера совмещенный с 4 регуляторами оборотов для бесколлекторных двигателей.Всё это находится на одной плате что уменьшает количество пайки и даёт существенную экономию в весе.
Осмотр
Сначала краткие характеристики:
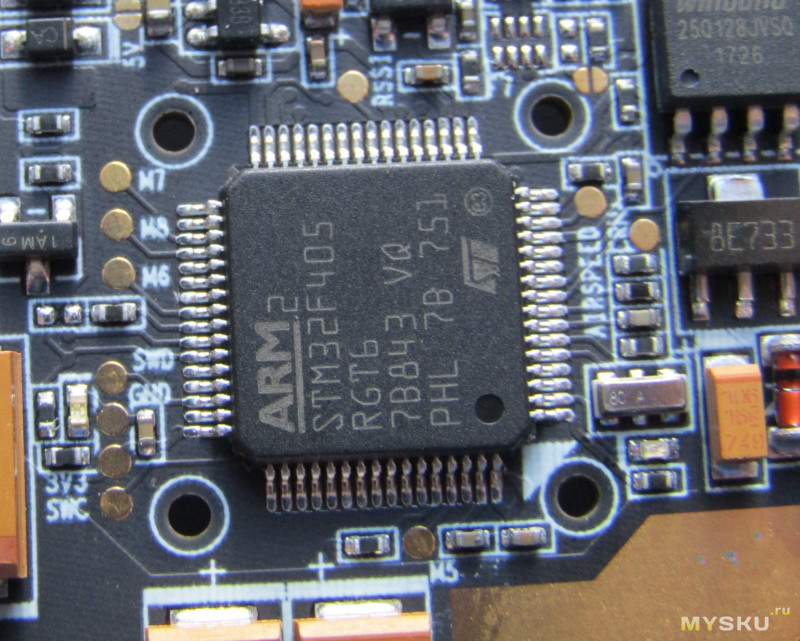
-процессор F4
-гироскоп MPU6000 подключенный по шине spi(что даёт возможность увеличить частоту обновлений гироскопа до 8мгц)
-отверстия для крепления 30.5×30.5mm(стандартные)
-поддержка 3-4s lipo аккумуляторов
-5в бек на 2А
-наличие осд чипа
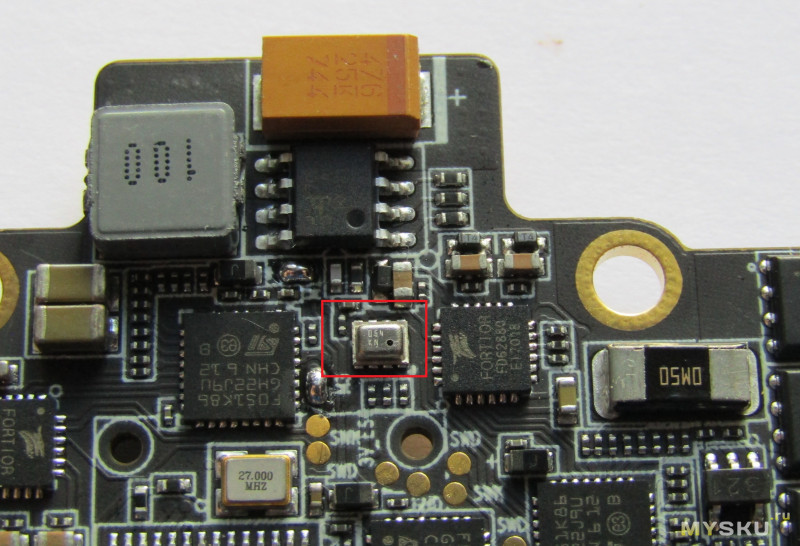
-барометр BMP280
-4 32-х битных регулятора оборотов
-6 юарт портов(на данные порты мы можем повесить различную переферию, к примеру gps, компас, управление камерой и т.д.)
Посылка пришла в картонной коробке, внутри был пакет с пупырками в котором лежал сам Asgard в антистатичном пакете.К упаковке претензий нет, риск поломки при транспортировке снижен к минимуму.
Плата и вся пайка выполнены на высоком уровне, всё чисто, отмыто от флюса.
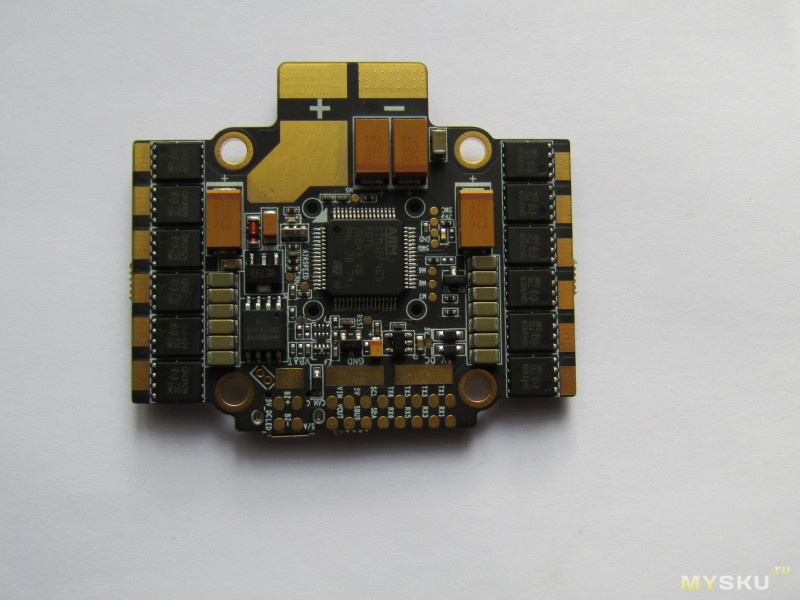

Теперь предлагаю детально осмотреть сначала одну сторону платы, потом другую, сделать некие выводы и перейти к установке на квадрокоптер.
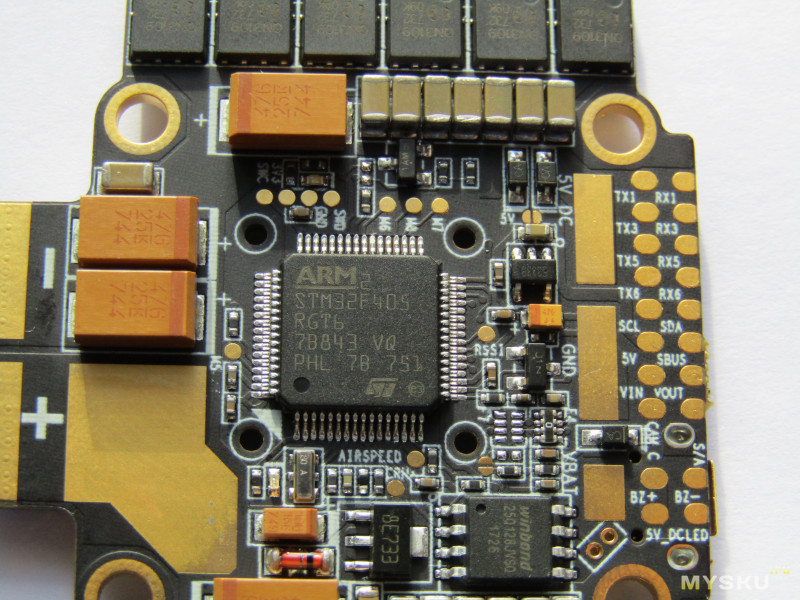
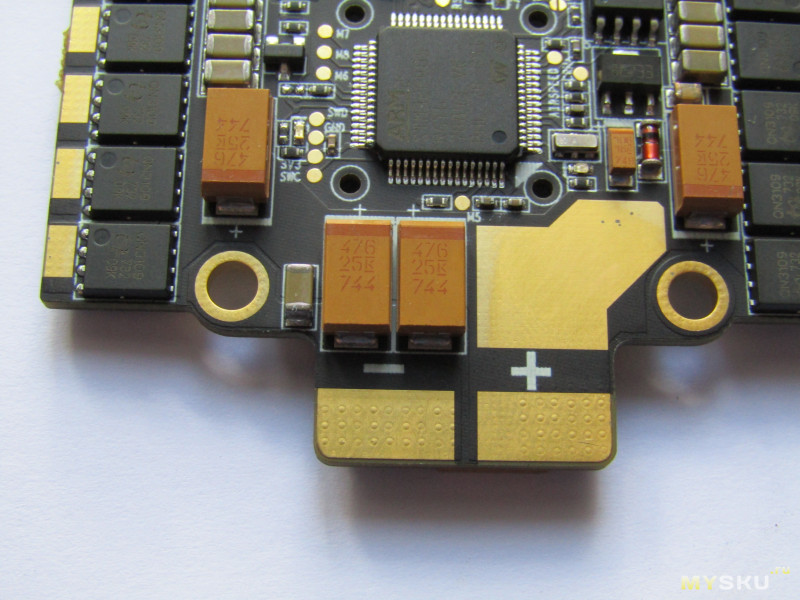
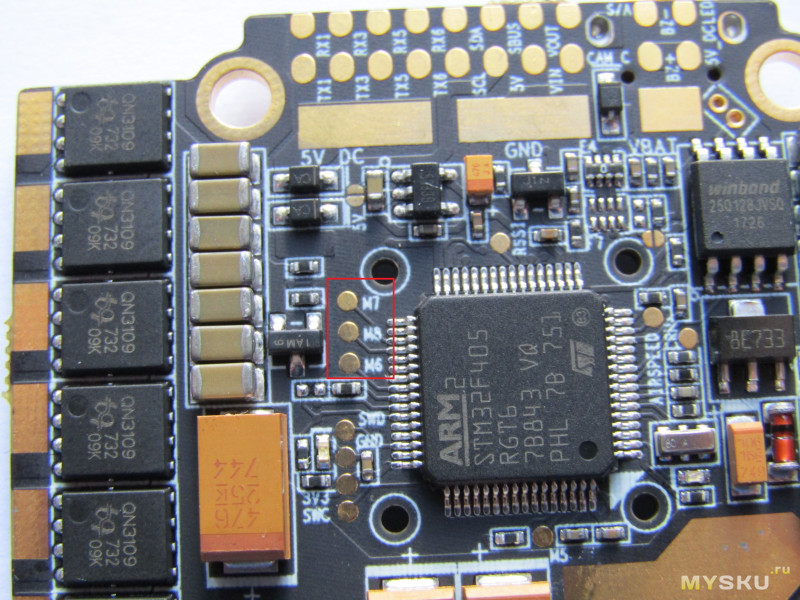
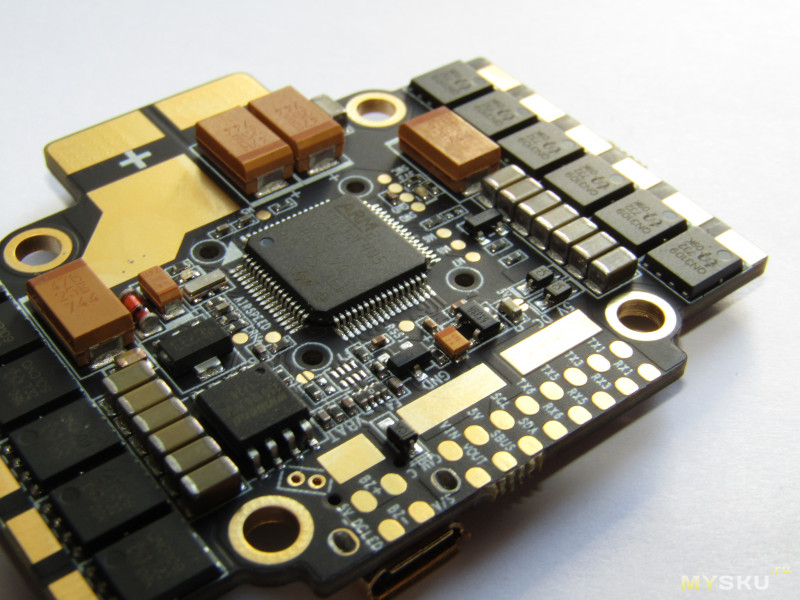
Центральный процессор у нас F405RGT6
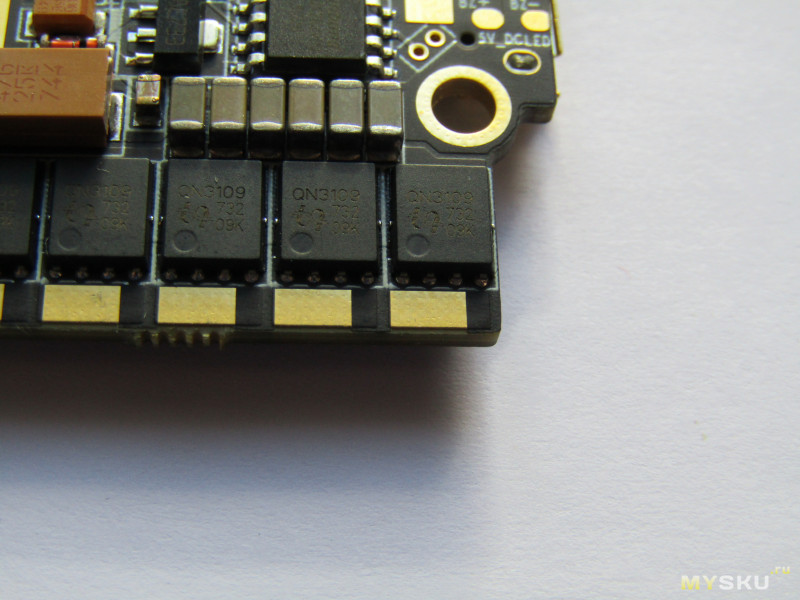
Мосфеты используются QN3109.Я либо плохо разбираюсь в даташитах либо мосфеты и вправду рассчитаны на максимальный ток 150А!!! Если это правда, то шанс выхода из строя мосфета сводится просто к минимуму!
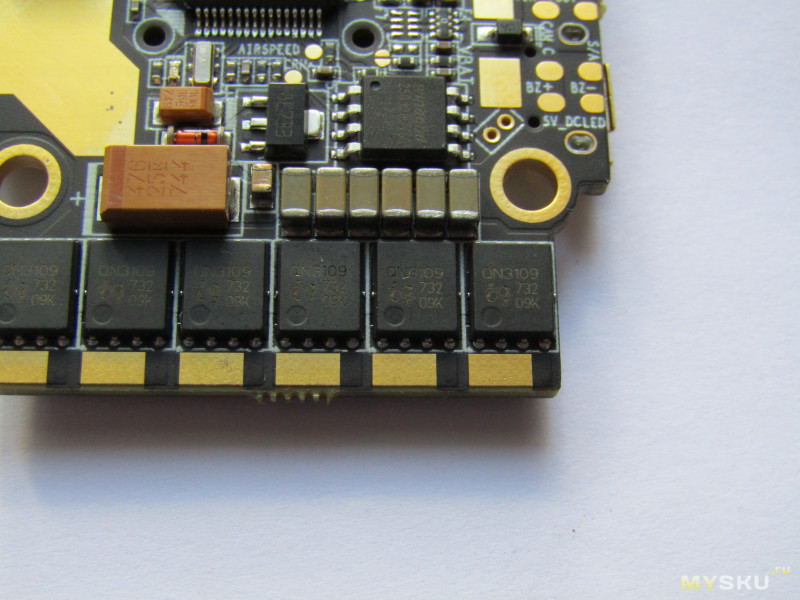
На входе стоят два больших танталовых конденсатора.Так же по бокам чуть выше стоят ещё 2 таких же конденсатора.По заявлению производителя использовать дополнительные конденсаторы не требуется.
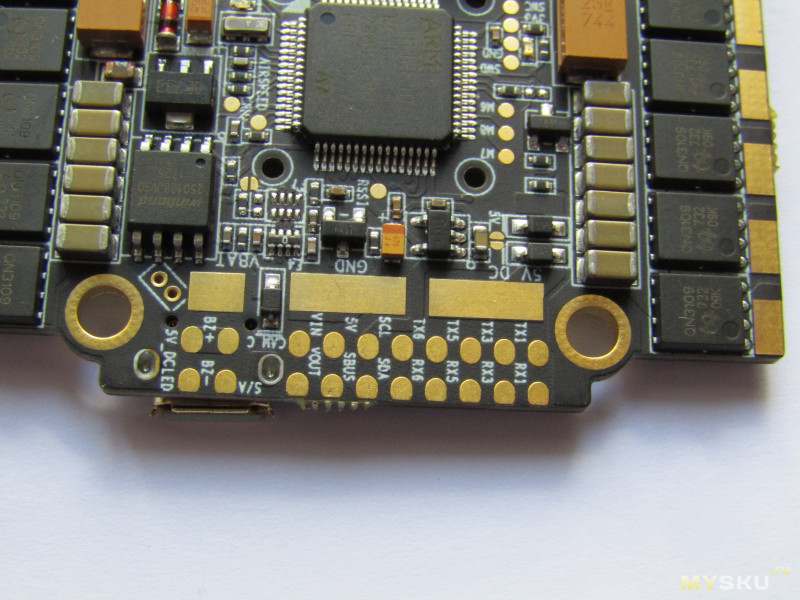
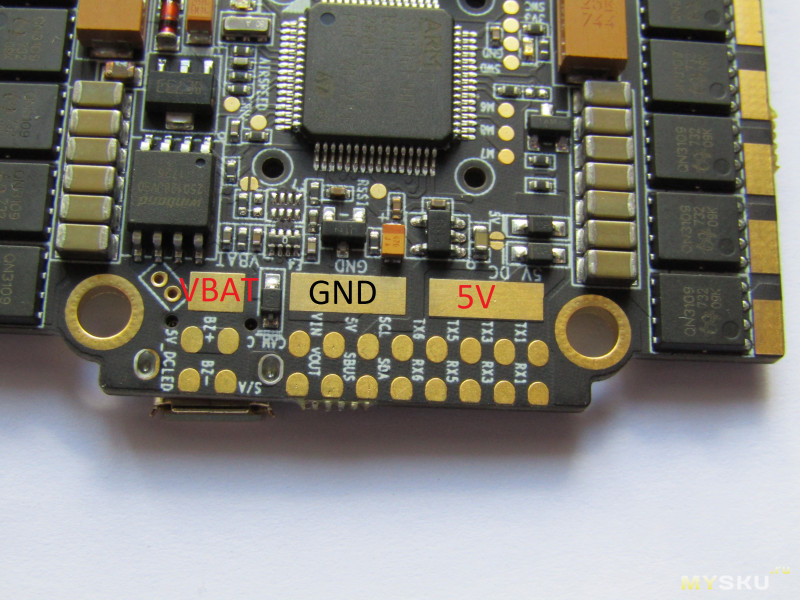
Далее находятся пяточки для припаивания приёмника радиоуправления, видео передатчика, видео камеры, различных периферийных устройств.Так же очень удобно сделаны дополнительные выводы земли,5в и одна площадка напрямую соединена с + контактом батарейки(эти 3 площадки выполнены в форме прямоугольников)
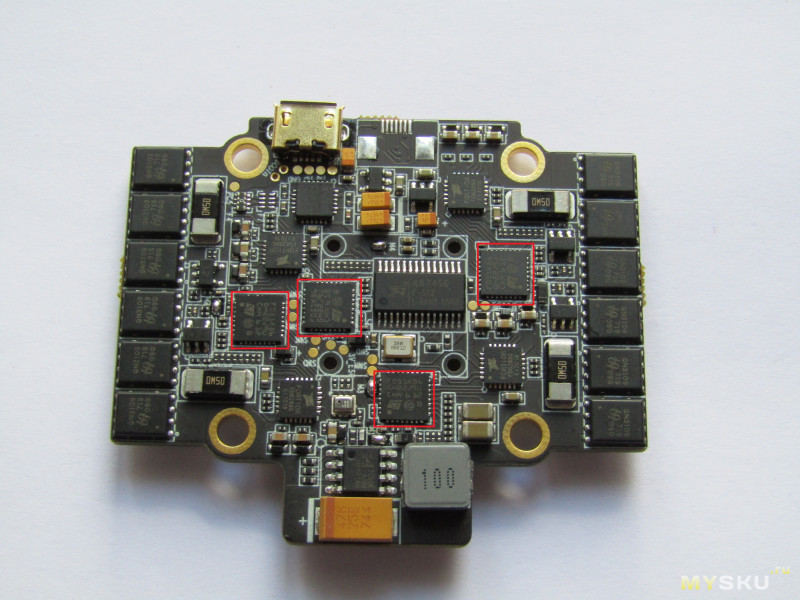
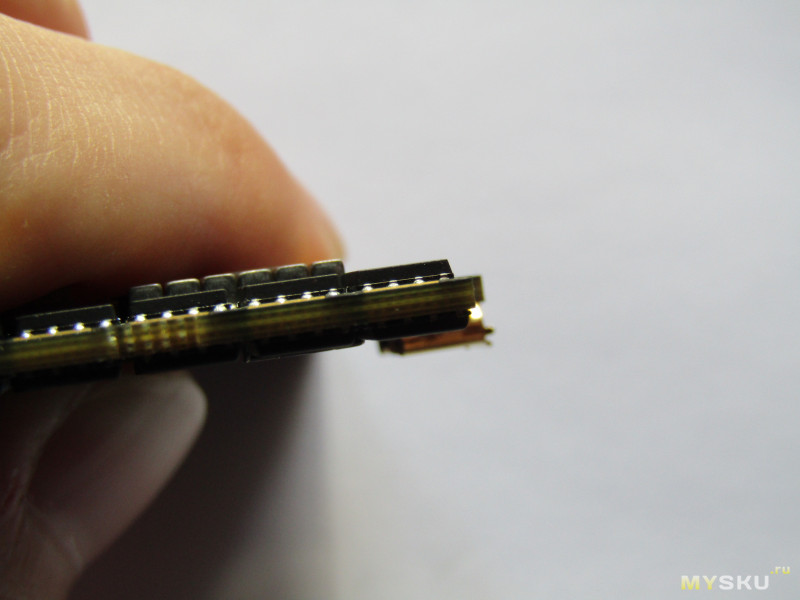
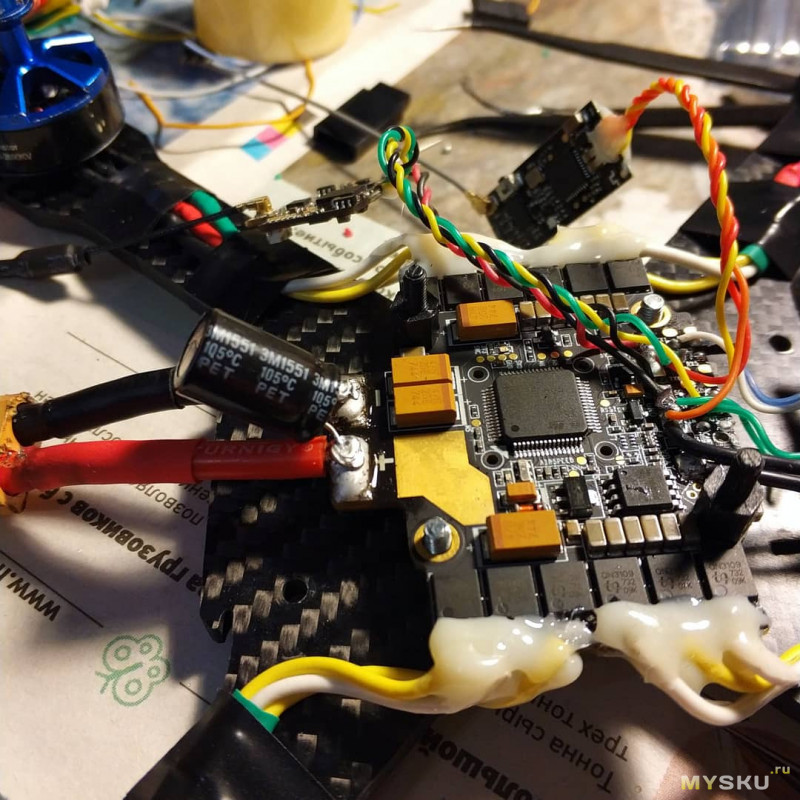
Порадовала возможность подключение доп регуляторов и сделанные под них отдельные управляющие пяточки(1 фото)
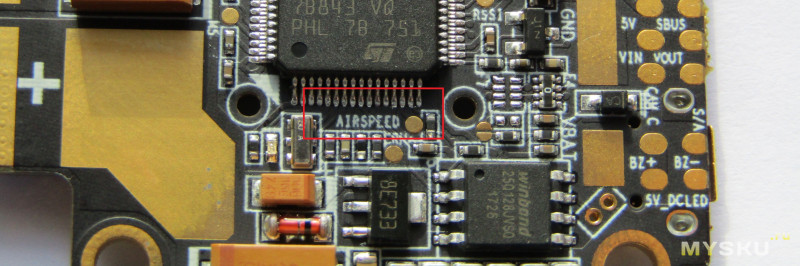
Из интересного есть пяточёк для подключения датчика воздушной скорости но на кой он нам на гоночном квадрокоптере я без понятия, пятак есть я и показываю :) (2 фото)
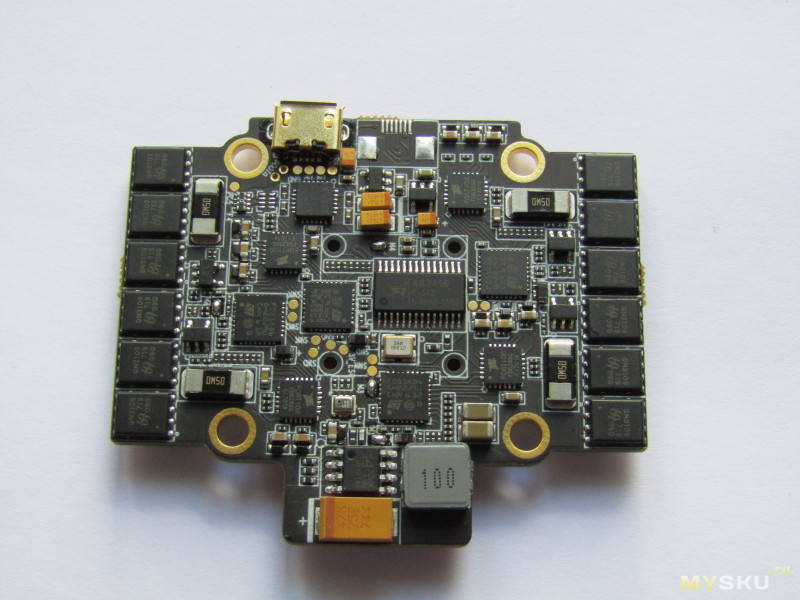
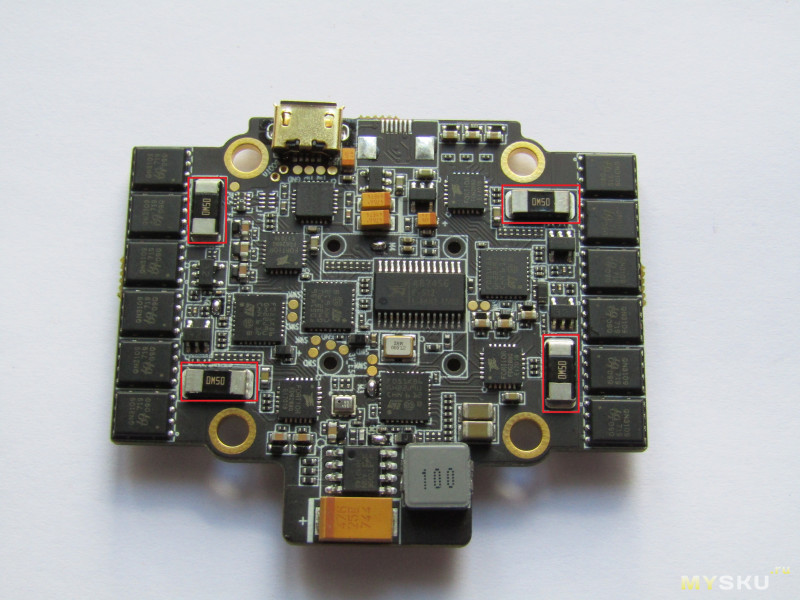
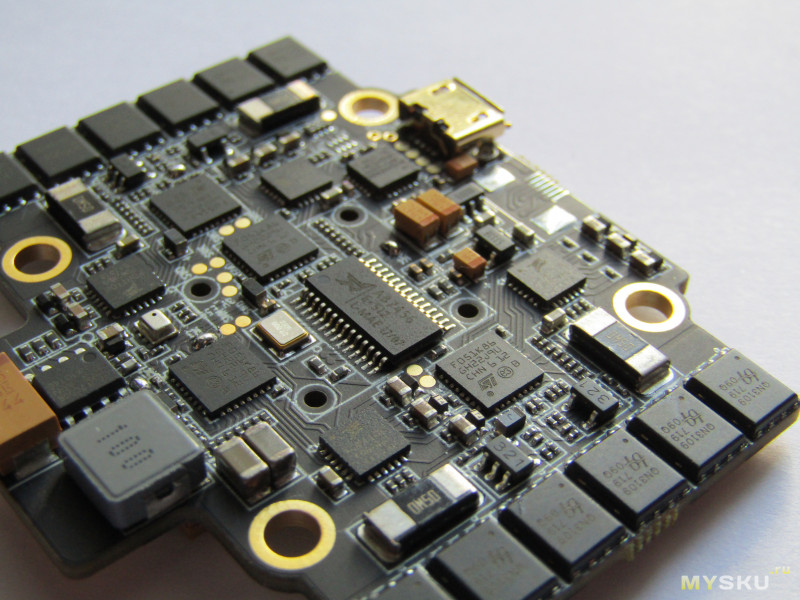
На обратной стороне находится у нас 4 датчика тока для каждого регулятора оборотов.
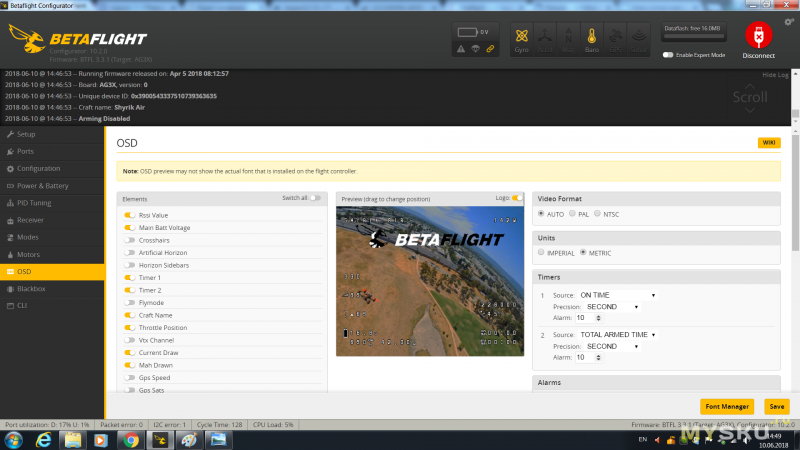
Чип ОСД AB7456.Данный чип имеет широкий диапазон рабочего напряжения так, что можно не бояться что ОСД пропадёт в полёте.
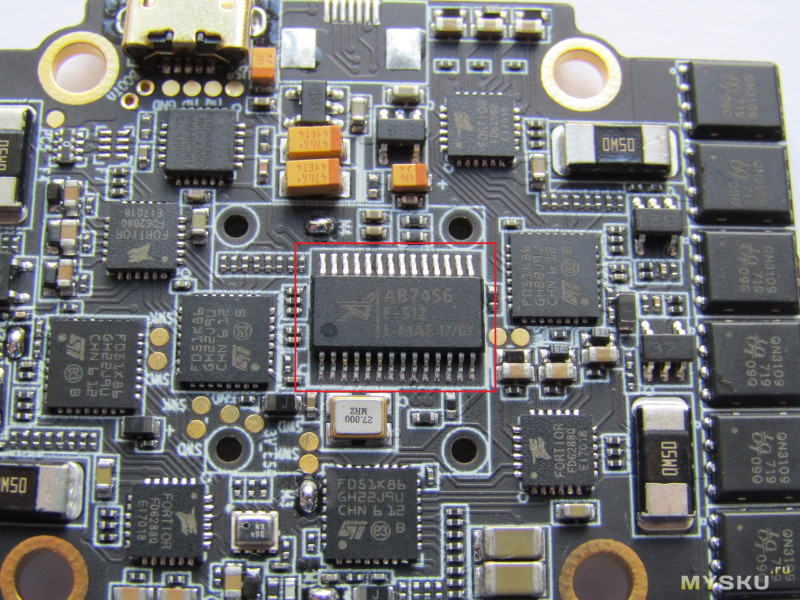
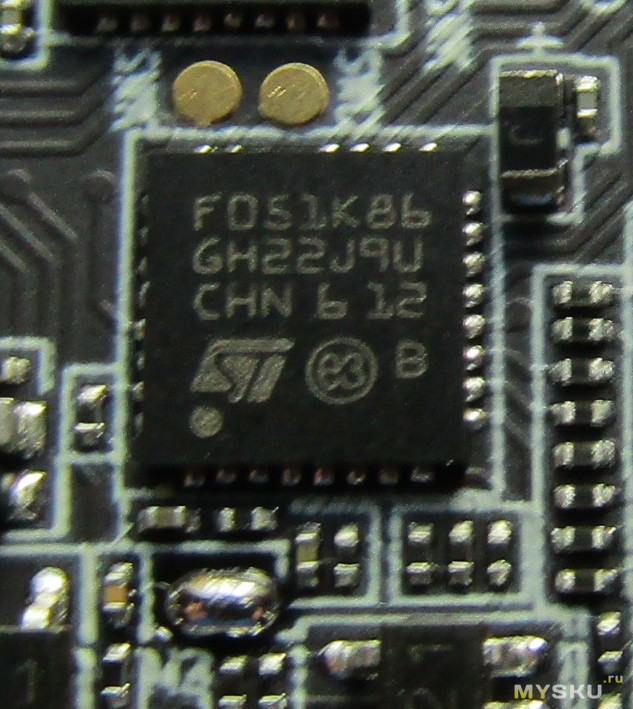
4 32-х битных процессора регуляторов F051k86
Что это даёт?
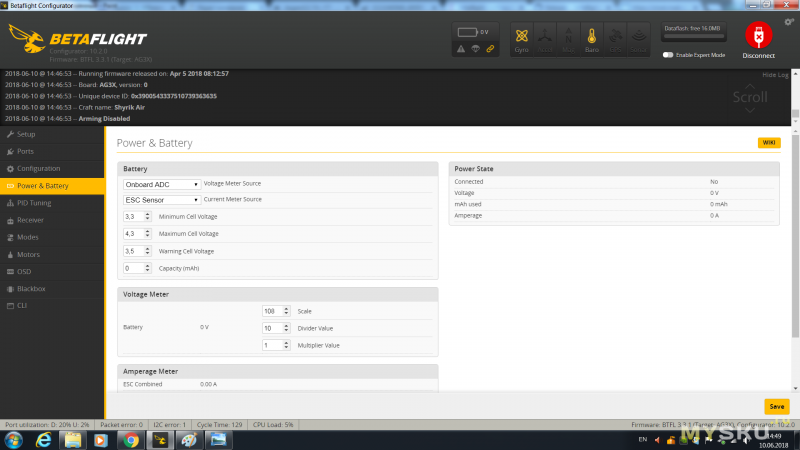
Более скоростные протоколы передачи управления и телеметрию регуляторов.Как пишут производители и разработчики прошивки, ПК получая данные телеметрии ориентируется на температуру и токопотребление, благодаря этому производит более чёткий контроль управление и в случае выхода показаний за рамки прекратит подачу тока и убережёт ваши компоненты.Но это на словах, реально подтвердить или опровергнуть пока что я не могу.Однако уже сейчас можно в настройках выставить ограничение по току, за пределы которого не выйдет регулятор оборотов.
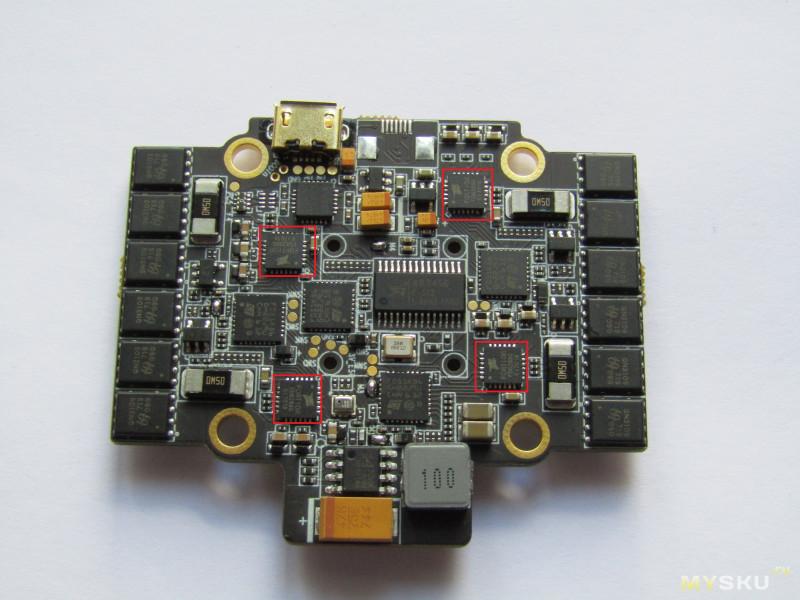
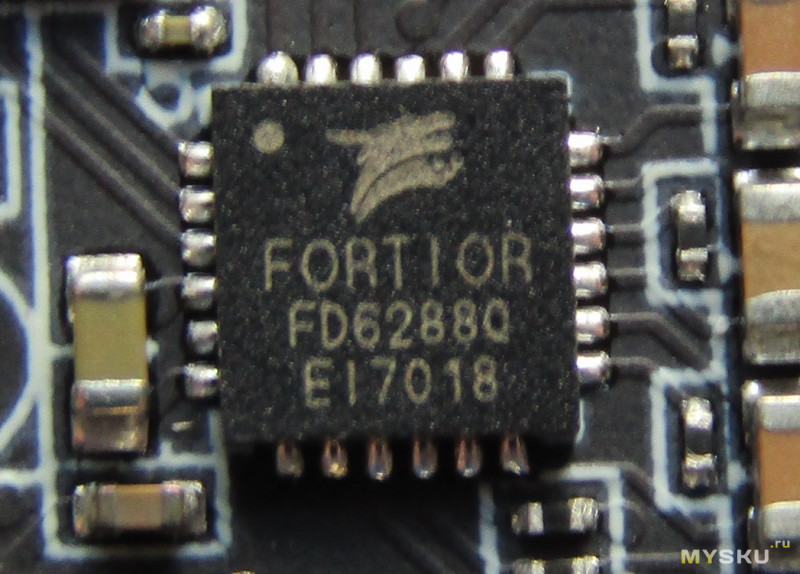
4 драйвера регуляторов FORTIOR fd6288q
Из интересного присутствует барометр BMP280
Теперь я хотел бы поговорить немного о возможных изменениях которые скоро могут произойти и были мною замечены.Дабы не засорять обзор, кому интересно прошу под спойлер.
 А ещё внимание приковывает нераспаяный разъём.К такому разъёму обычно подключается шлейф гироскопа, так что уверен скоро возможно будет приобрести данный мозг с высокочастотным гироскопом.
А ещё внимание приковывает нераспаяный разъём.К такому разъёму обычно подключается шлейф гироскопа, так что уверен скоро возможно будет приобрести данный мозг с высокочастотным гироскопом. 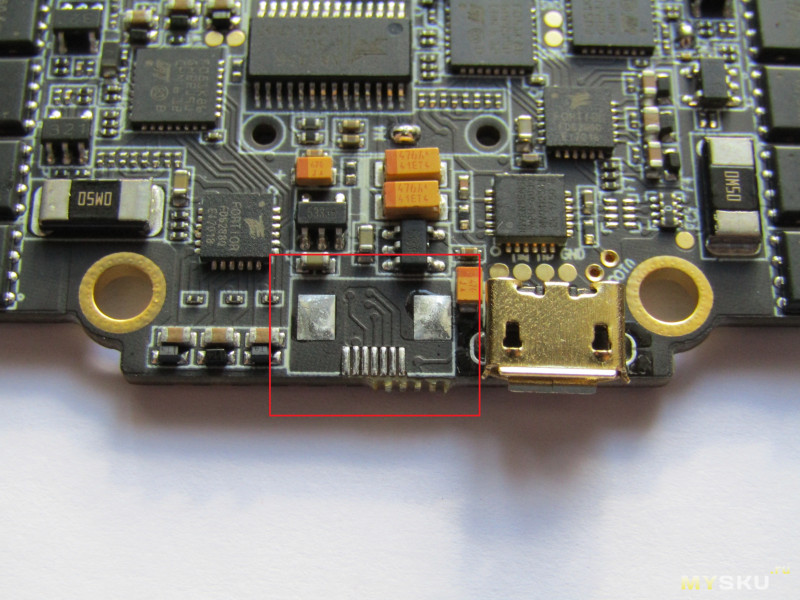 Хочется вставить пару слов об ещё одной вещи.В процессе написания обзора на странице магазина появилась возможность выбрать процессор F7 вместо F4, но на практике под F7 софт почти не оптимизирован и смысла в нём мало.
Хочется вставить пару слов об ещё одной вещи.В процессе написания обзора на странице магазина появилась возможность выбрать процессор F7 вместо F4, но на практике под F7 софт почти не оптимизирован и смысла в нём мало.Дорожки
Как показала практика, а отлетал я прилично и пару раз хорошо приложил об землю квадрокоптер, дорожки не горят и всё максимально надёжно, проблем нету.Под спойлером приложу несколько фотографий кому интересно.

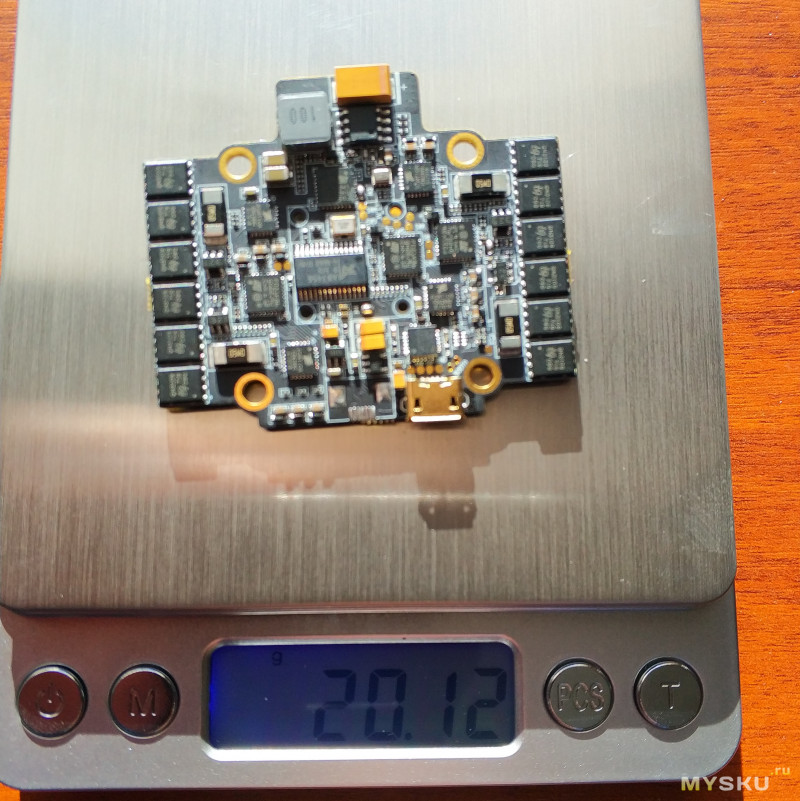
Вес
Для такого функционала вес в 20 грамм это фантастика.
Как бонус пара фотографий с разных сторон.Можете оценить качество и сделать для себя свои выводы.
Инструкция
В инструкции ничего интересного особо нету, кому интересно могут скачать её и посмотреть.
Сборка
По сборке ничего трудного нету.Надо припаять моторы, приёмник радиоуправления, камеру и видео передатчик.И можно лететь :)
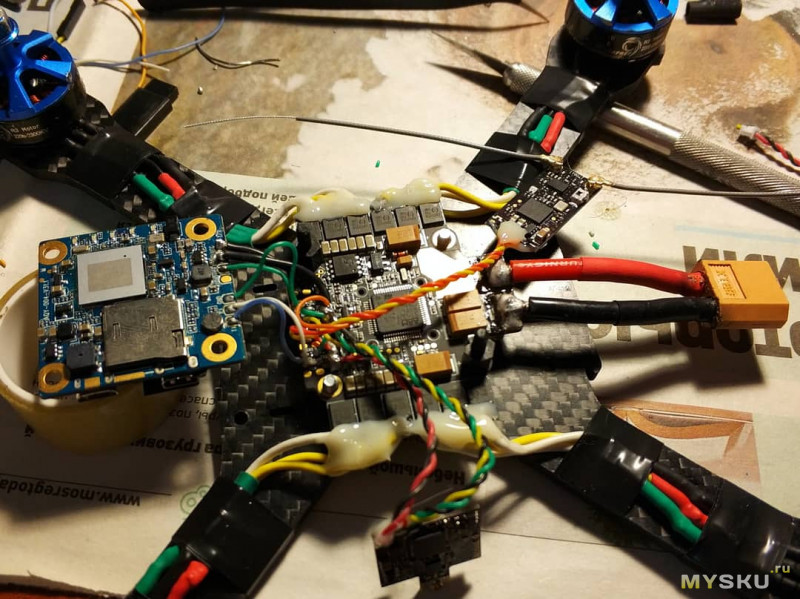
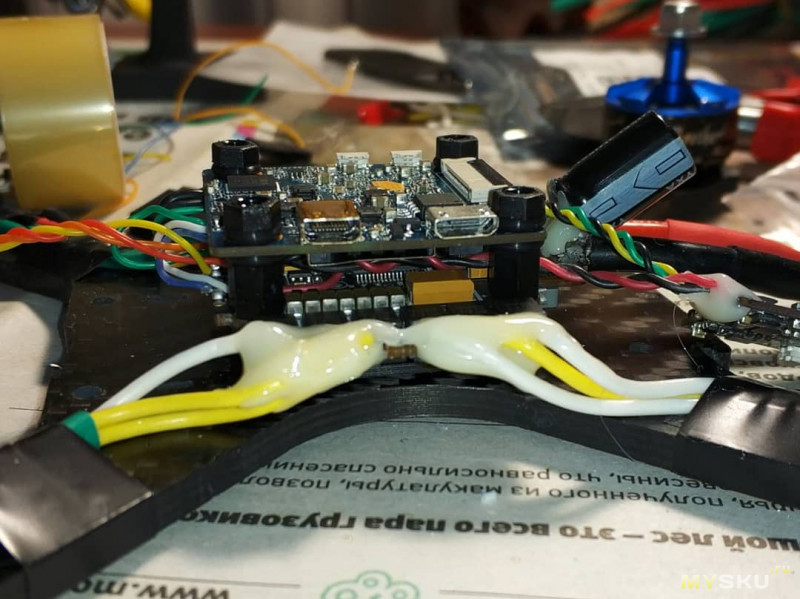
Пара фоток процесса
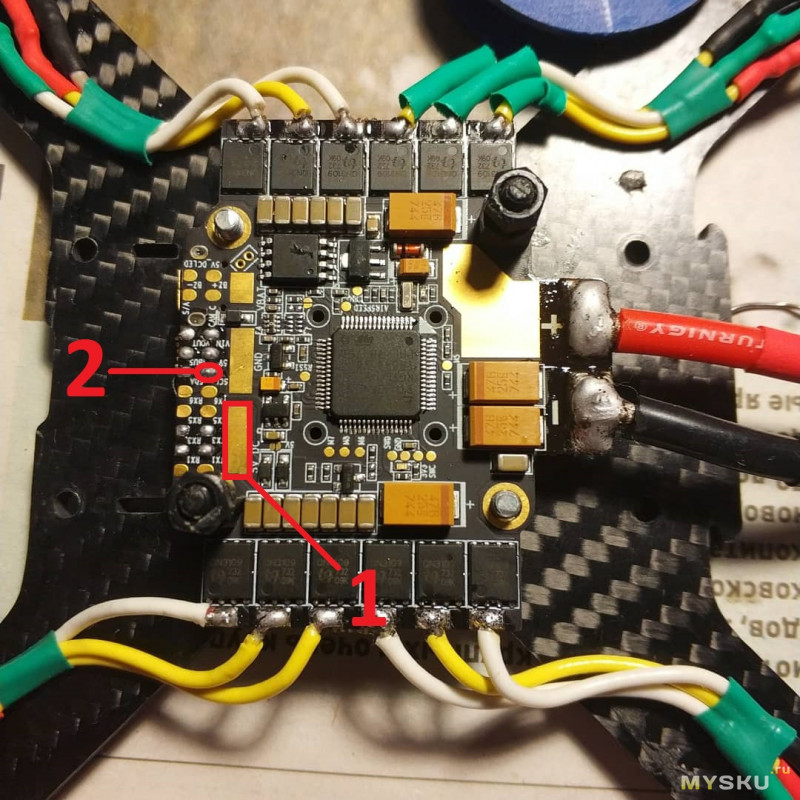
Пара важных дополнений!
1) Конденсатор я напаял так как, установил камеру Runcam Split 2.Так как она питается напрямую от аккумулятора, то для уменьшения скачков напряжения я поставил кондёр.
2)На плате имеются два пятака с выводом 5в.И на 1 пятаке напряжение 5.01в, а вот на втором напряжение уже 4.67в.Для кого-то это может стать критично, а кому-то всё равно.Так как я использую аппаратуру Radiolink AT9, у неё рекомендуемое напряжение питание приёмника 5в.
Прошивка
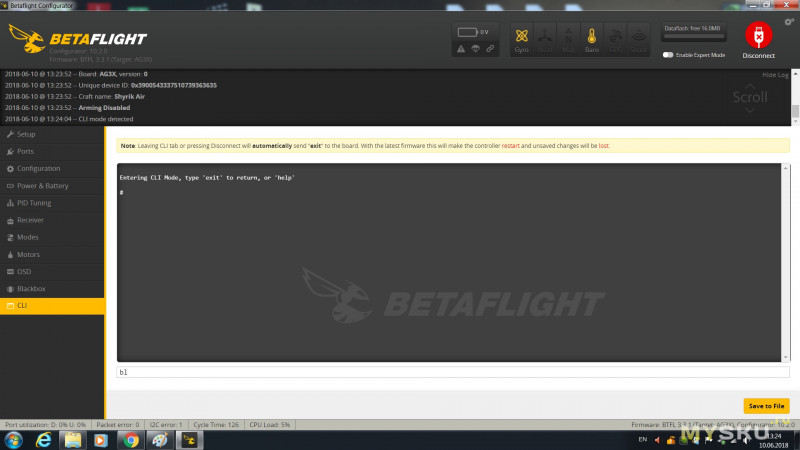
Потом подключаем асград к компьютеру, подключаемся и переходим во вкладку cli.В неё надо написать bl и нажать enter.После этого мозг перейдёт в режим прошивки.
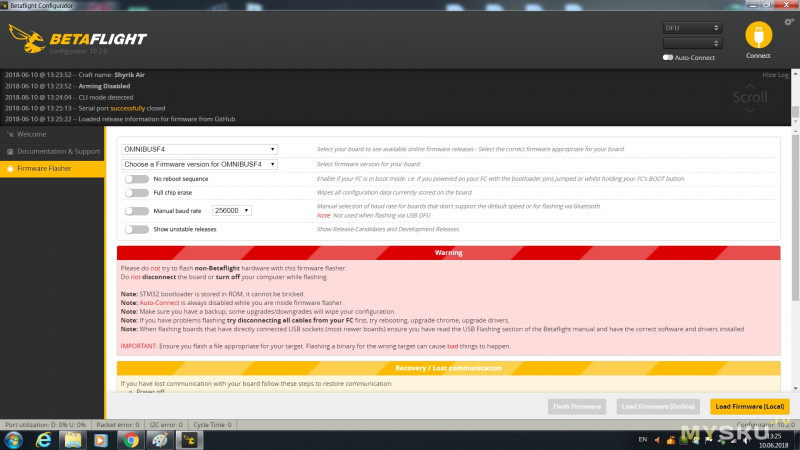
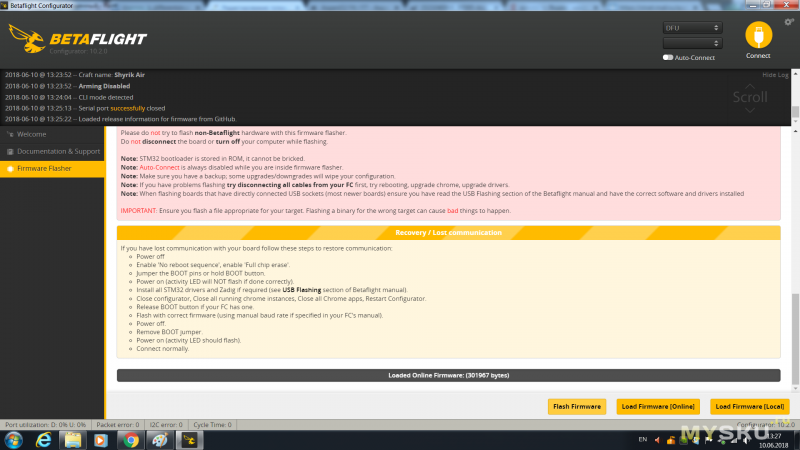
Идём во вкладку firmware flasher.
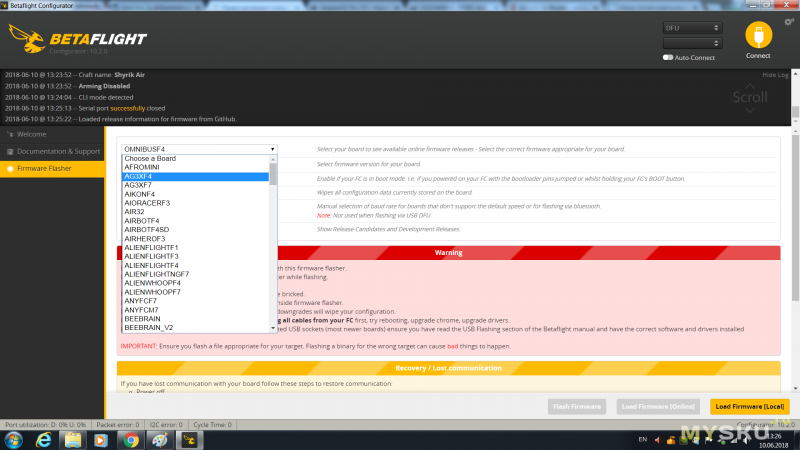
Из списка надо выбрать прошивку для AG3XF4
В пункте ниже выбираем версию прошивки.На данный момент доступно только 3.3.3, её и выбираем.Ставим галочку на full chip erase и нажимаем на load firmware online
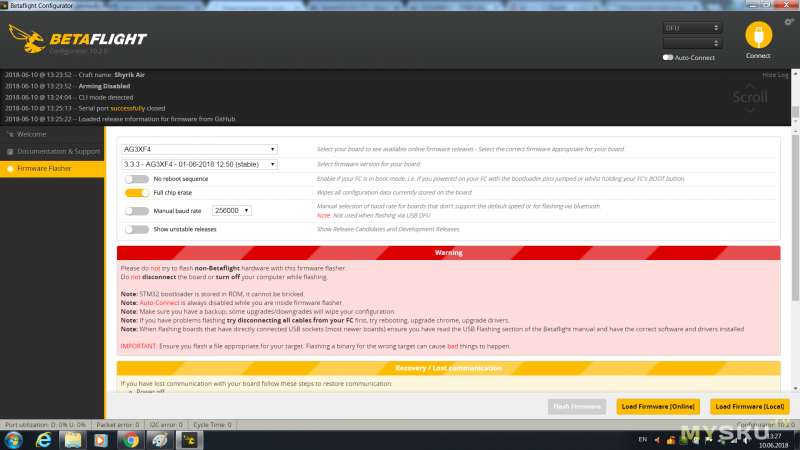
После того как прошивка скачалась, жмём flash firmware и всё, мозг прошит.
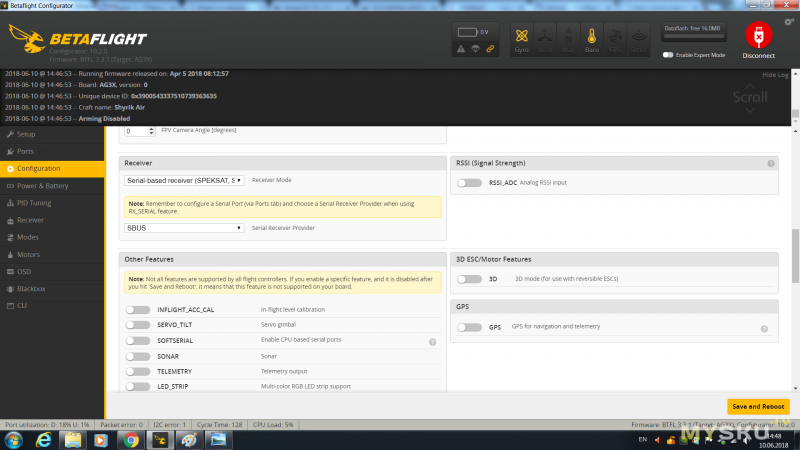
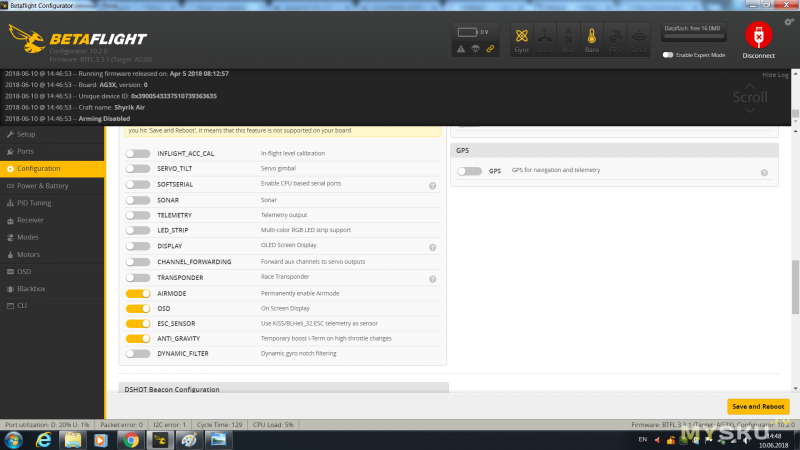
Настройка
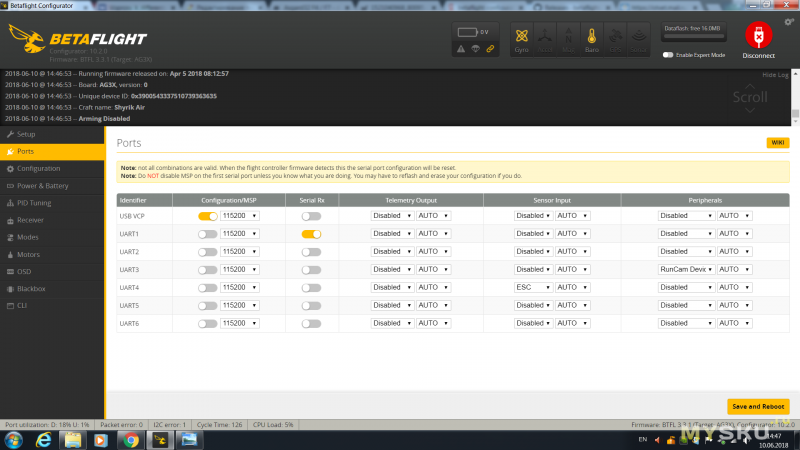
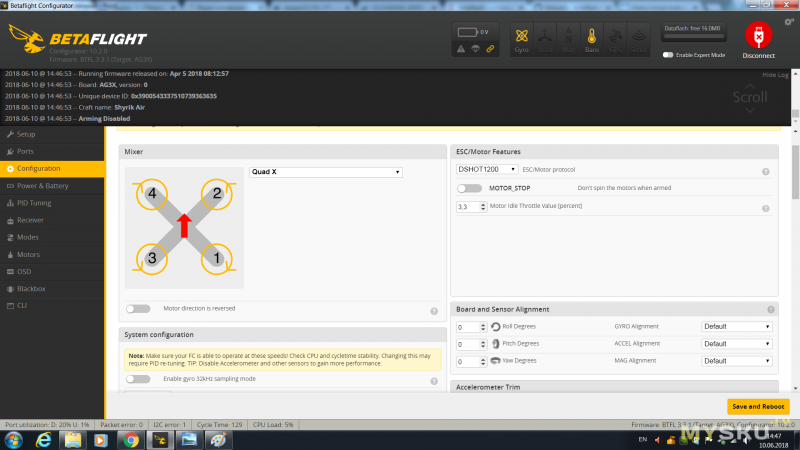
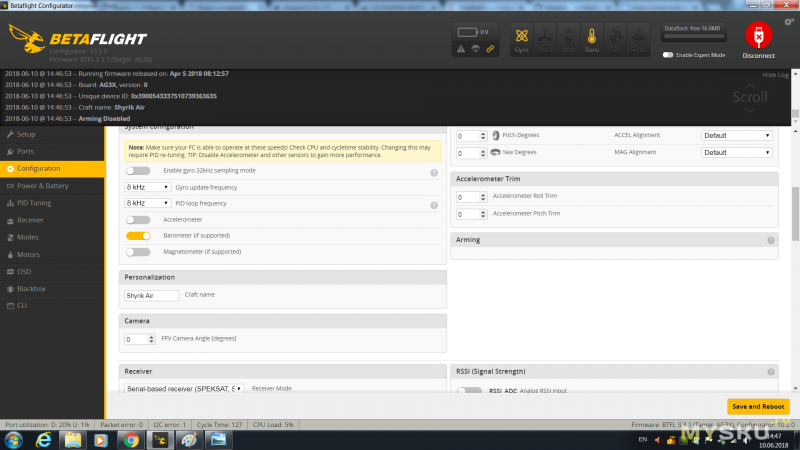
Что касаемо настройки, то это очень индивидуальная вещь по моему мнению.Под спойлером я выложу свои настройки.В принципе вы можете их взять, но если у вас приёмник так же подключен, как и у меня к мозгу по протоколу sbus.
Из рекомендуемого, я бы всем посоветовал выставить протокол работы регуляторов dshot1200 и частоту обновления гироскопа и пид контроллера 8/8.
Впечатления и вывод
В целом Асград вышел отличным мозгом.Гироскоп mpu6000 очень не требователен к вибрациям, и именно благодаря ему с полётом квадрокоптера не возникло ни каких проблем.Пайки в мозге минимум, собран качественно.
Если вы гонитесь за весом то пожалуй это лучшее решение на рынке.
Из минусов я заметил пожалуй один: это то что на одном пяточке мозг не выдаёт ровные 5в.
Спасибо всем кто дочитал!
А вот и видео как летает данный зверь:
Товар предоставлен для написания обзора магазином. Обзор опубликован в соответствии с п.18 Правил сайта.
(c) 2017 Источник материала