

- Цена: менее 1000 рублей
Вот первая версия моего платосверлила:

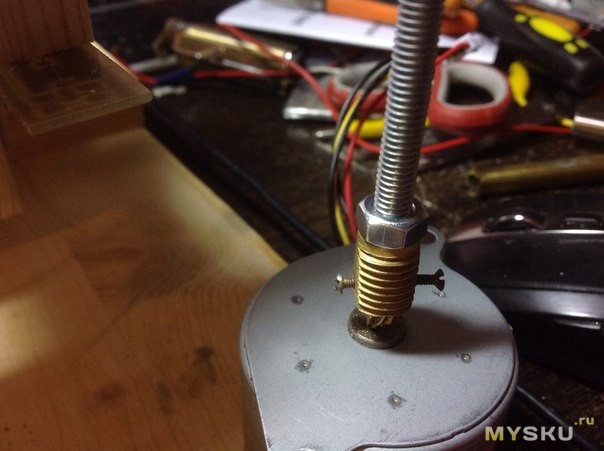
люди с инженерным мышлением сразу заметят наркоманское положение рычага относительно направляющих (шиссот рублев за латунную трубку, и еще столько же за латунный стержень! да луше б я в китае купил линейние подшипники и две направляющих), из-за такого решения шпиндель ходит неравномерно, рывками, и можно переломать некоторое количество сверел, если они из твердосплава. А ради них все собственно и затевалось.
Пока ждал железо, замутил могучую подсветку для этого станка

прибор говорит что ОЧЕНЬ ЯРКО. Но работать комфортно, регулировку подсветки решил не делать
Начал пилить привод оси У. Решил просто добавить немного деревяшек к существующей конструкции

Настала очередь электроники.
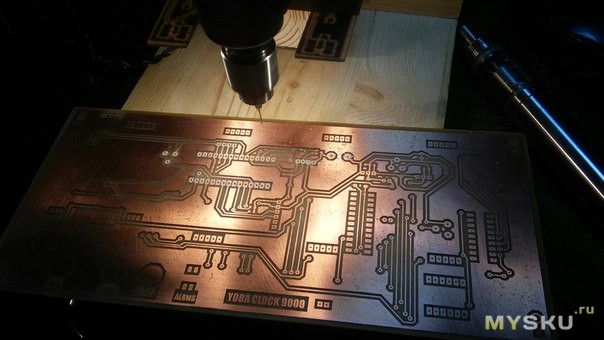
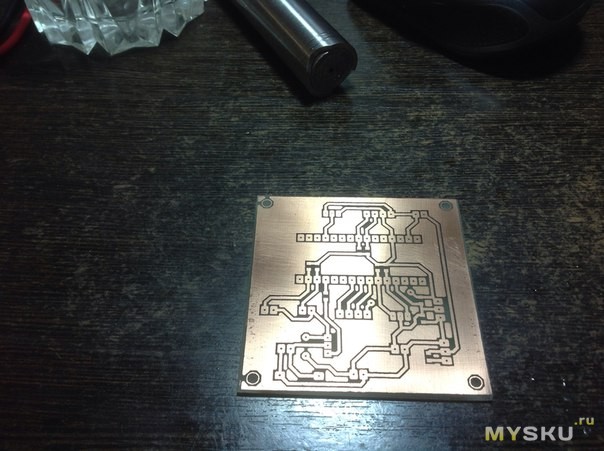
Поигрался в протеусе и на макетке со схемой и кодом, и вытравил плату для будущего контроллера
В качестве мозгов станка выступит ардуино нано, ибо кодить для чего-то более серьезного я не могу. Управление при помощи потенциометра и энкодера с кнопкой.
Сам драйвер называется в интернете EASY DRIVER, что как бы говорит о простоте работы с ним. Это верно. Ему нужно два сигнала — STEP и DIR. Первым мы шагаем движком, вторым говорим, в какую сторону шагать. После пробы топорной библиотеки для него я решил написать всё сам, получилось в итоге неплохо.
Питается это всё от ноутбучного блока питания на 19 вольт. Драйвер может пропустить через себя до 30 вольт, а мотор с патроном рассчитан на 24, если не ошибаюсь, оборотов у него все таки маловато.
Видео первого теста:
Энкодером можно двигать шпиндель вверх-вниз по оси У, переменный резистор задает расстояние, на которое шпиндель сдвинется за один щелчок энкодера, а так же задает скорость подачи при нажатии кнопки «СВЕРЛИТЬ!» Очень удобно оказалось использовать заранее подготовленный алгоритм проделывания отверстия. Так же для понта приделал валявшийся дисплей. Подключил его с помощью вот такого адаптера i2c? чтобы сэкономить ноги ардуины
Прикрутил все платы и ручки на места, и вот что получилось:


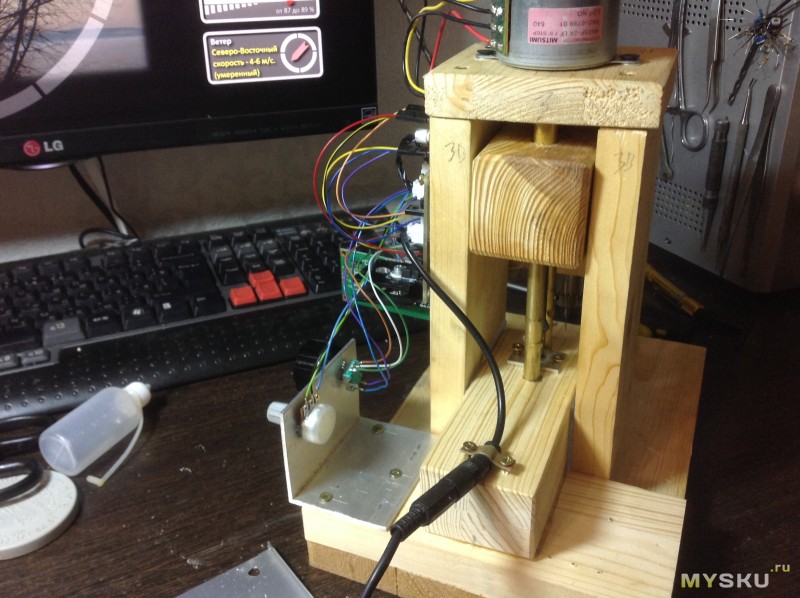

Помучившись с кодом заставил все это работать как мне нужно, и вот готовое устройство.
Теперь осталось надумать новый безумный проект, чтобы опробовать свое поделие в боевых условиях, а так же приделать педаль, чтобы освободить руки.
Если кого что заинтересовало в обзоре, спрашивайте, личка, комменты, как угодно
(c) 2015 Источник материала.