
- Цена: $49.99
Первым делом думаю стоит сказать пару слов о том, что из себя представляет регулятор оборотов.
Краткие характеристики:
- 32-х битная прошивка (BLHELI32)
- Процессоры F3
- Рабочий ток регулятора 45А
- Наличие общего датчика тока
- Размеры 36х36 мм (крепёжные отверстия 30,5х30,5 мм)
- Поддержка питания от 3s до 6s
- Поддержка протоколов управления Oneshot / Multishot / Dshot
Что это даёт?
Более скоростные протоколы передачи управления и телеметрию регуляторов. Как пишут производители и разработчики прошивки, ПК получая данные телеметрии ориентируется на температуру и токопотребление, благодаря этому производит более чёткий контроль управление и в случае выхода показаний за рамки прекратит подачу тока и убережёт ваши компоненты. Но это на словах, реально подтвердить или опровергнуть пока что я не могу. Однако уже сейчас можно в настройках выставить ограничение по току, за пределы которого не выйдет регулятор оборотов. В данное время если установлен более мощный процессор, а в нашем обзоре именно так и есть, то можно выставить более высокие частоты переключения фаз тем самым добиться ещё более большой плавности в работе.
Сразу предупреждаю это то, что можно найти в интернете и то, что нам дают разработчики этой прошивки и компонентов, реально же проверить все у меня просто нету такой аппаратуры, по этому это некая теоретическая статья о том, что же такое BLHELI32.
—
И небольшое обновление. В бета версиях нового betaflight 4.0 появилась поддержка обратной связи с моторами. Т.е. мозг квадрокоптера будет получать данные об оборотах каждого мотора! (раньше телеметрия передавала усреднённое значение оборотов со всех 4-х моторов.) Используя эти данные, разработчики betaflight ввели новый фильтр, который призван улучшить полет и сделать его более стабильным.
Посылка и осмотр девайса
Посылка приехала в простом пупырчатом конверте.
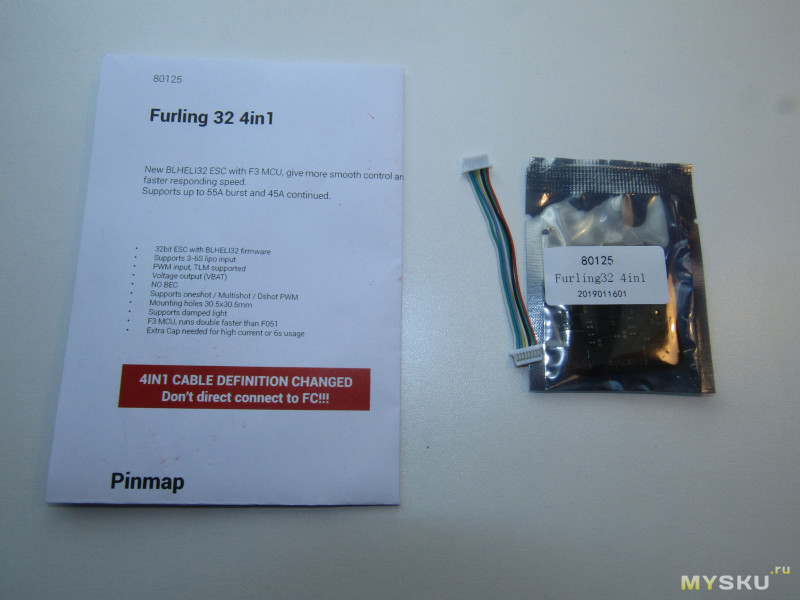
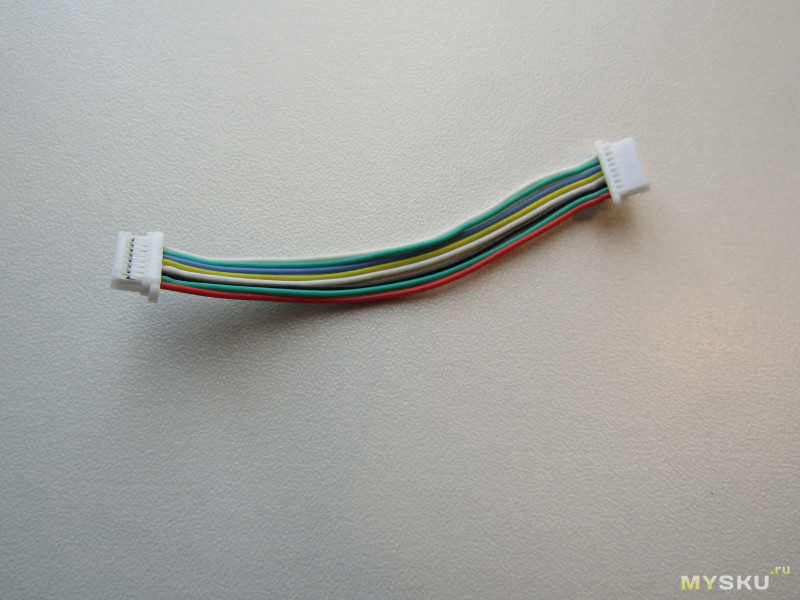
В комплектацию входит: регулятор, провод для соединения регулятора с ПК, и печатная инструкция.
Регулятор упакован в антистатический пакет.

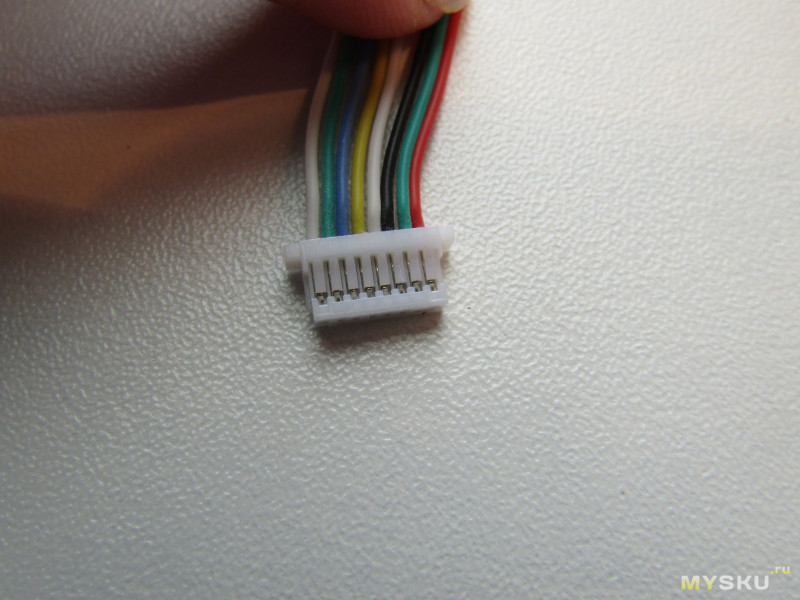
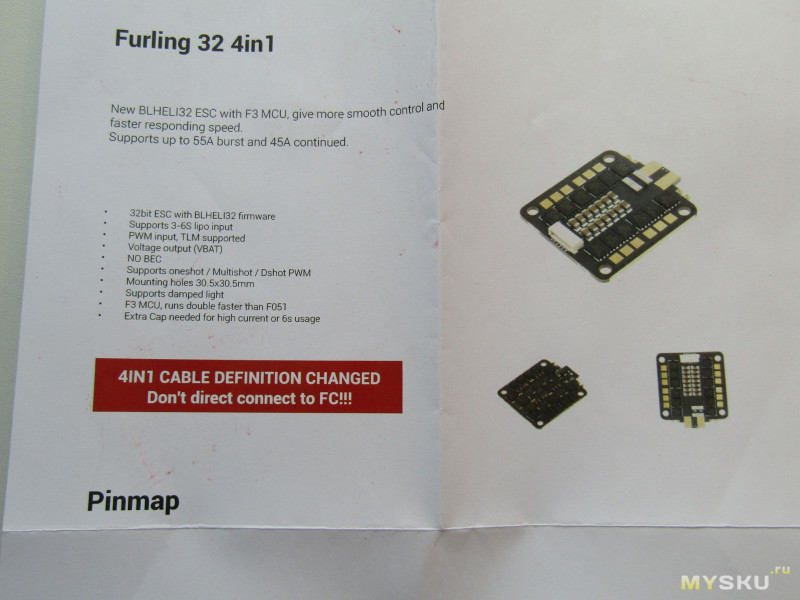
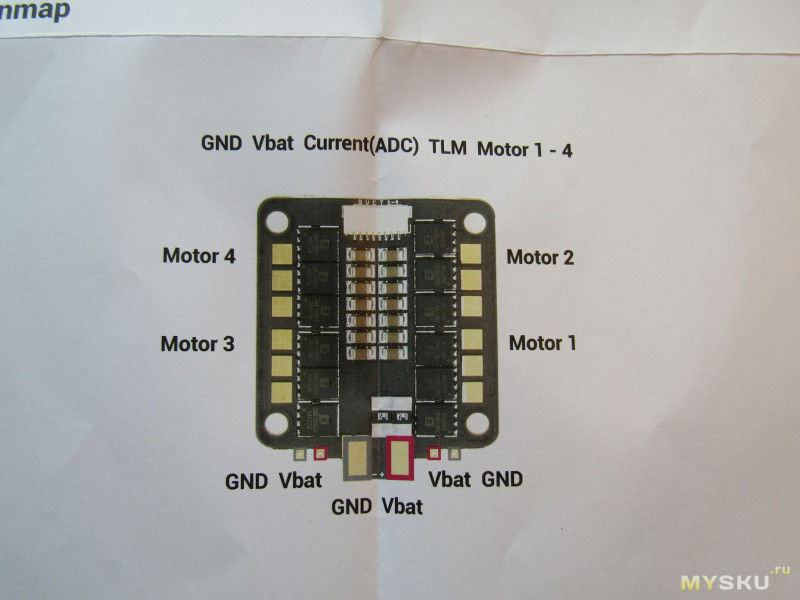
На обратной стороне нас встречает предупреждение что теперь распиновка кабеля изменена, производитель просит убедиться в правильности расположения проводов в разъёме, что бы не спалить полётный контроллер. В инструкции подписана распиновка разъёма на регуляторе.
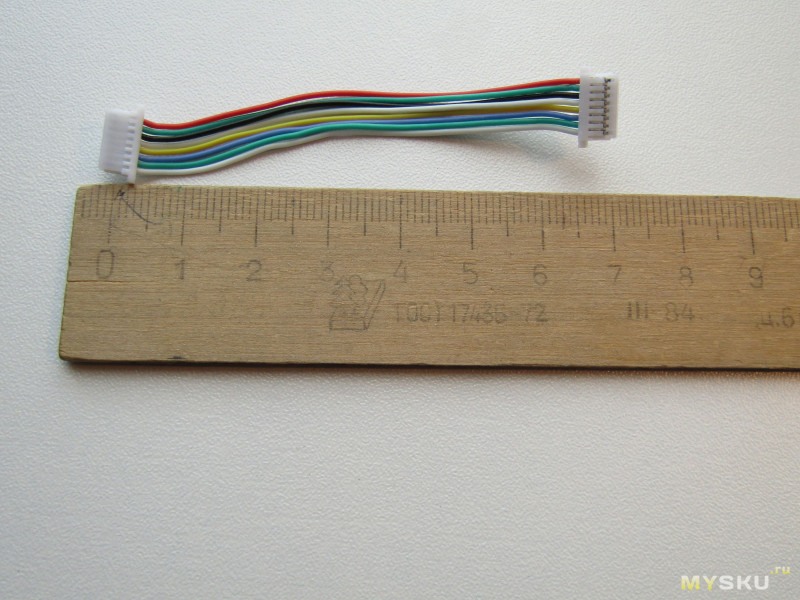
Провод для соединения регулятора с полётным контроллером (ПК) имеет длину 70мм.
Инструкция доступна в электронном виде, под спойлером прикреплю фото.
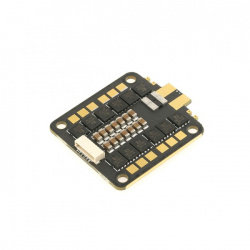
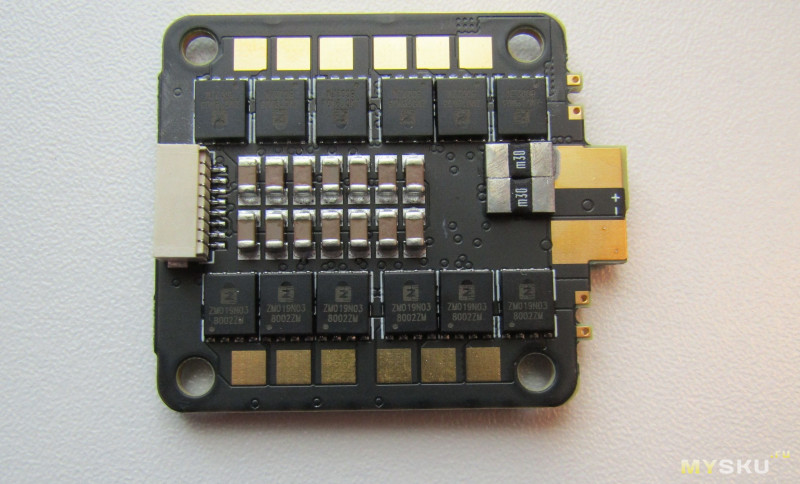
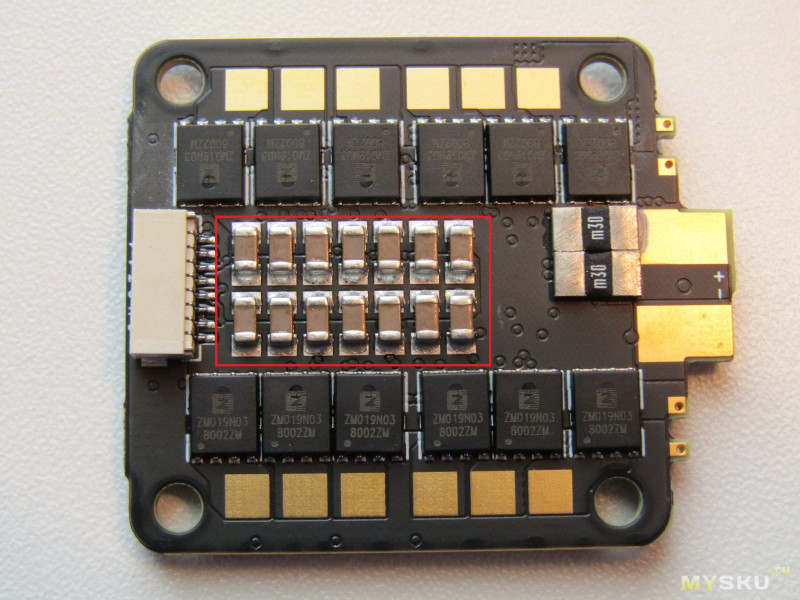
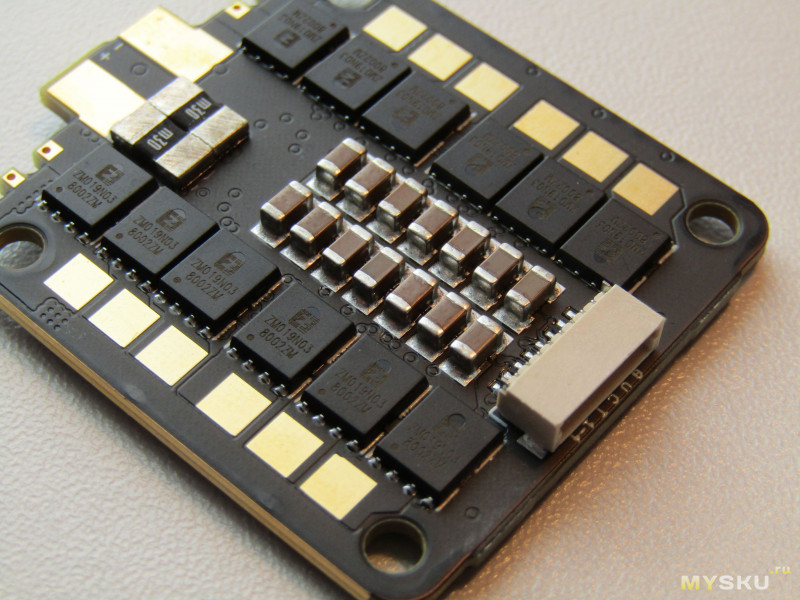
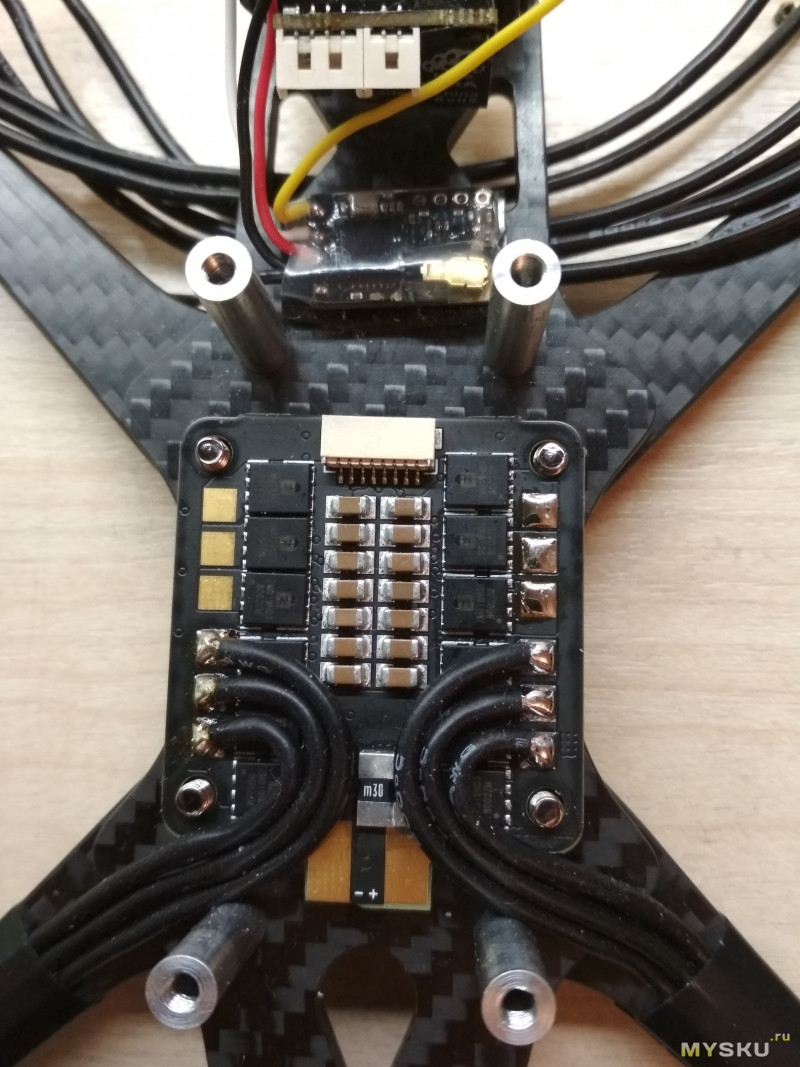
Теперь осмотрим плату регулятора.
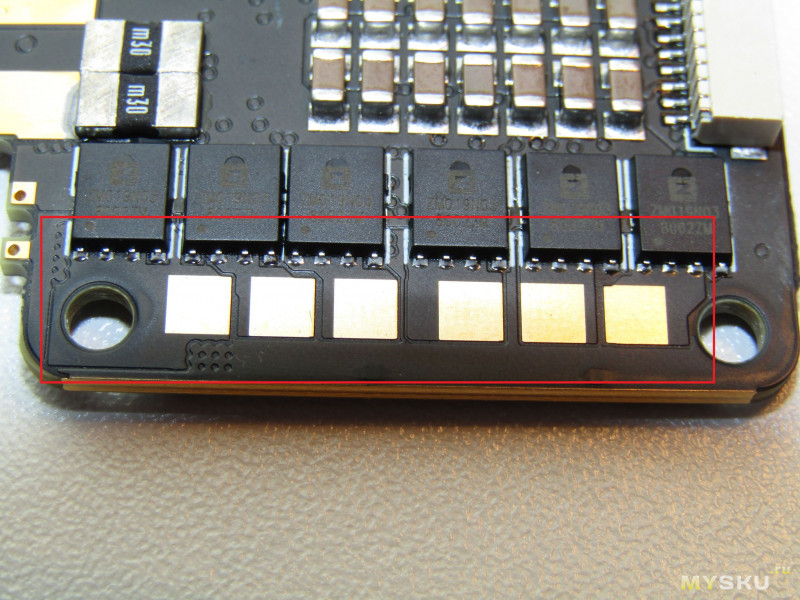
Сразу решил осмотреть дорожки куда припаиваются провода моторов. Арибот учли предыдущие свои недочёты и сделали широкие и толстые дорожки, минмимизуиря возможность прогара дорожки. Похожий подход уже был применен в регуляторе Typhoon32 V2 и показал хорошие результаты, Typhoon32 V2 используется мной уже год и стоит на основном квадрокоптере.
В глаза бросается необычный датчик тока, он выполнен из двух маленьких шунтов. В регуляторе Furling32 4in1 отказались от индивидуальных датчиков тока на каждый регулятор, и сделали общий датчик тока. Решение имеет место быть, так как индивидуальное потребление ещё нельзя посмотреть, а пилоту все равно показывается общее потребление тока.
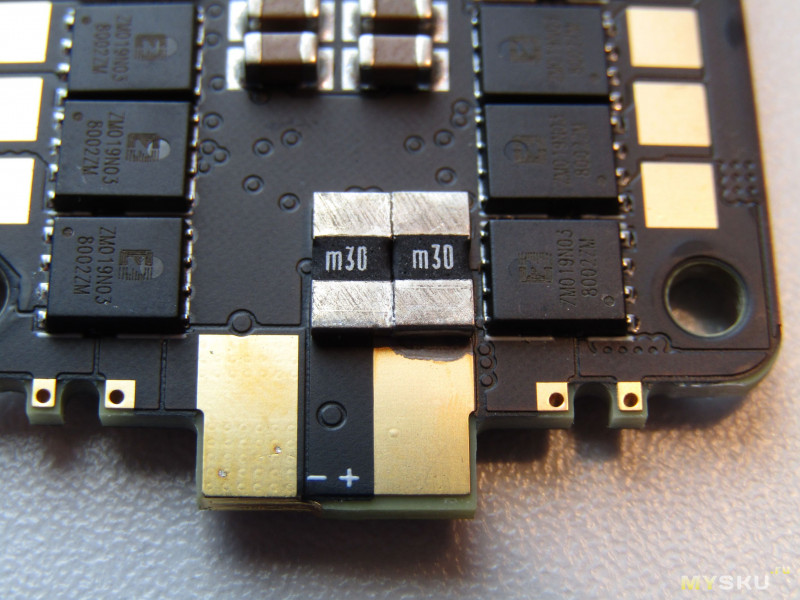
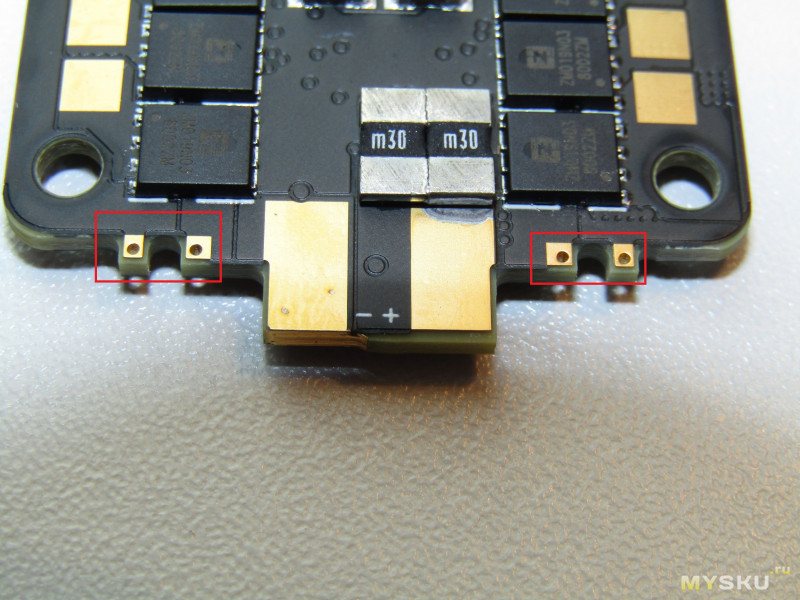
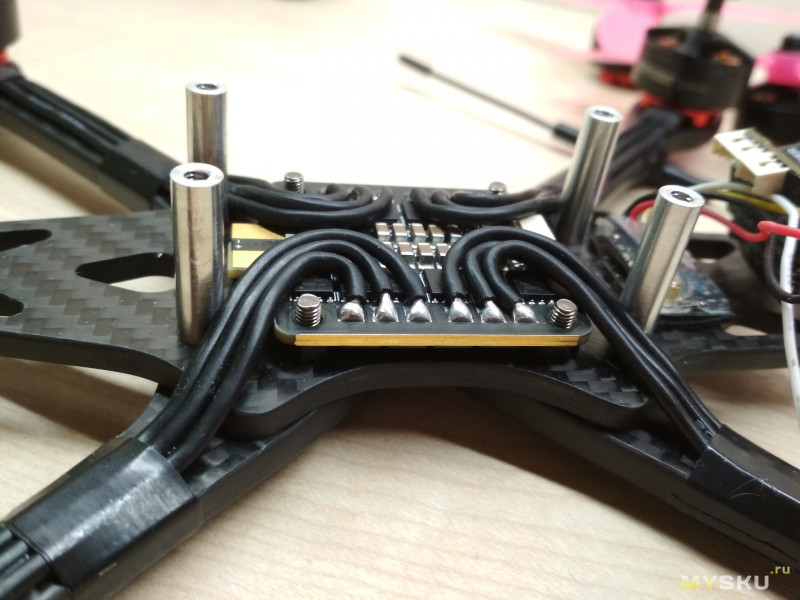
Имеются дополнительные площадки вывода напряжения с аккумулятора. К ним можно удобно припаять вещи которые вы собираетесь питать напрямую от батареи.
Мосфеты установлены по 6 штук на выход каждого мотора, три на одной стороне платы и три на другой.
Маркировка — zmo 19n03 8002zm
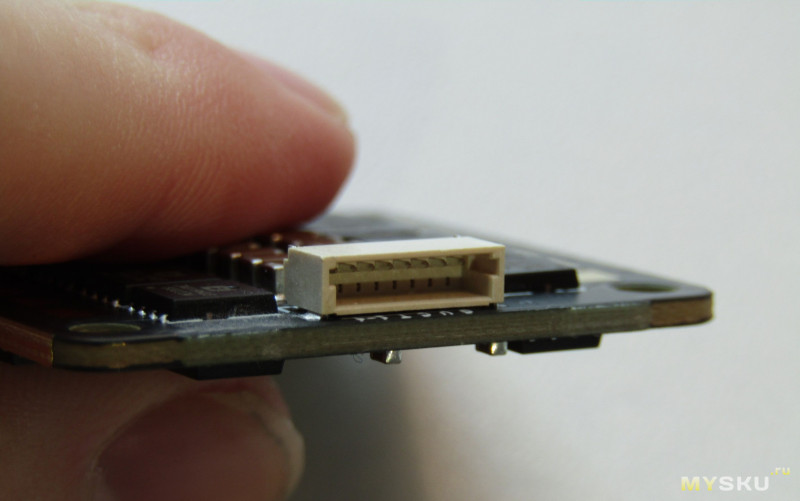
Разъём для подключения к ПК.
Распаяно небольшое количество конденсаторов.
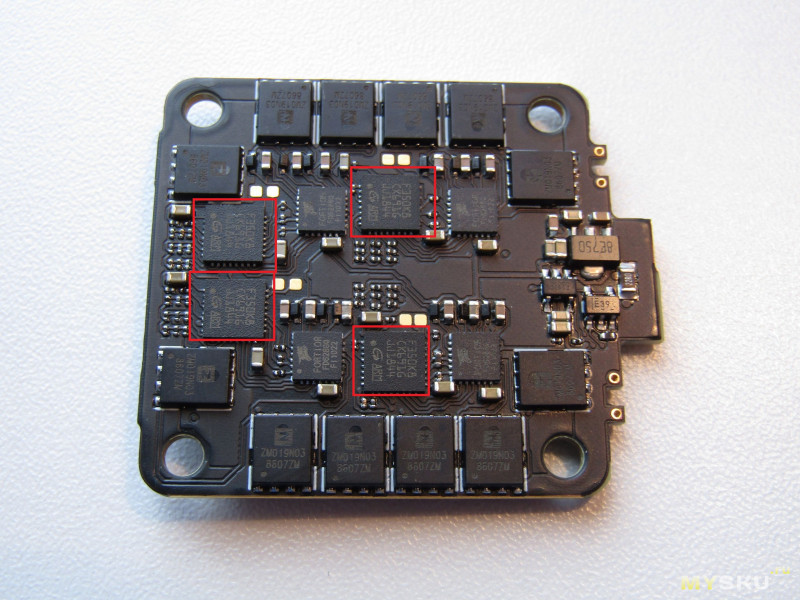
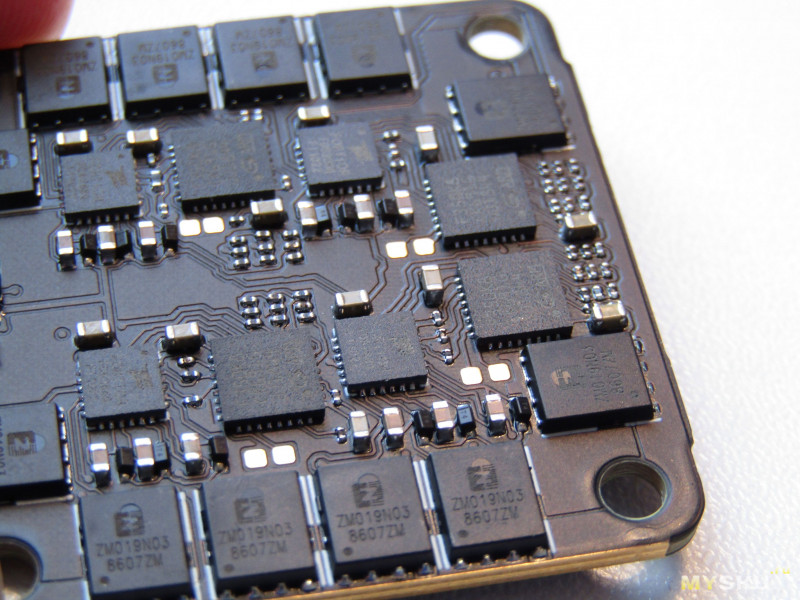
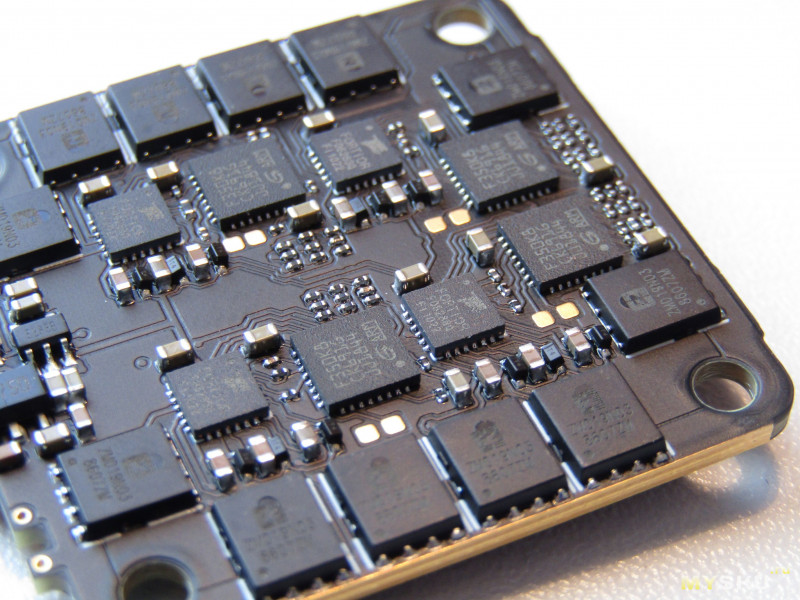
Перевернем плату и осмотрим её.
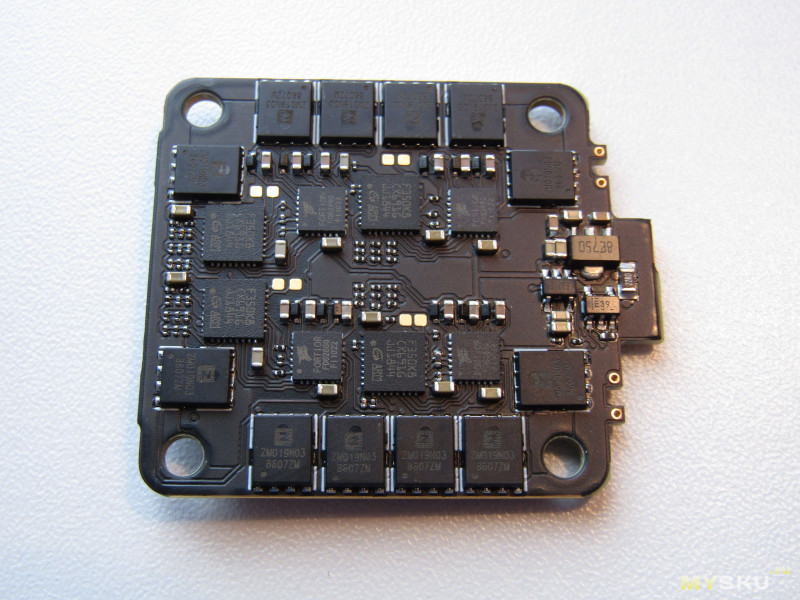
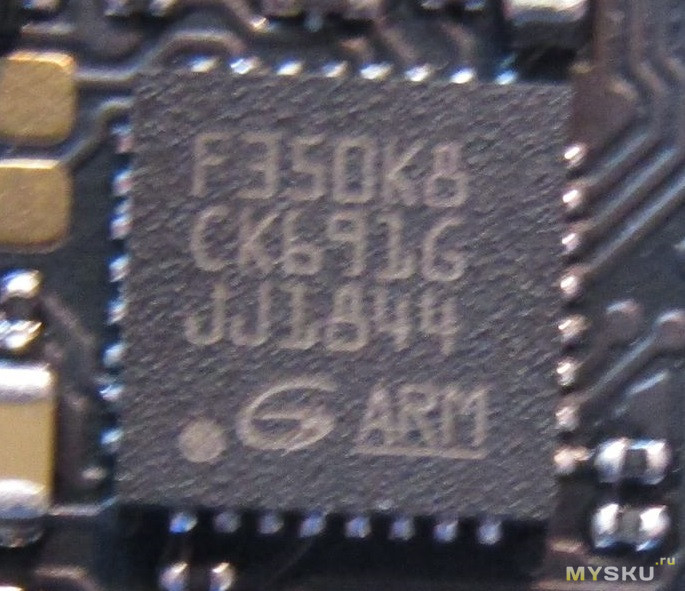
В регуляторе оборотов стоит 32-битный микроконтроллер фирмы GigaDevice с архитектурой ARM на ядре Cortex-M4 (серия F3xx), в отличие от чуть более старых микроконтроллеров серии F1xx на ядре Cortex-M3. В Cortex-M4 добавлены команды для цифровой обработки сигналов (DSP), что потенциально может увеличить скорость обработки сигналов от внешних датчиков. Благодаря новому микроконтроллеру доступны более быстрые протоколы управления регулятором и наличие телеметрии. В потенциальном будущем должны появится новые интересные функции, но пока что они находятся в бета тестах.
Маркировка — f350k8 ck691g. Предположительный даташит.
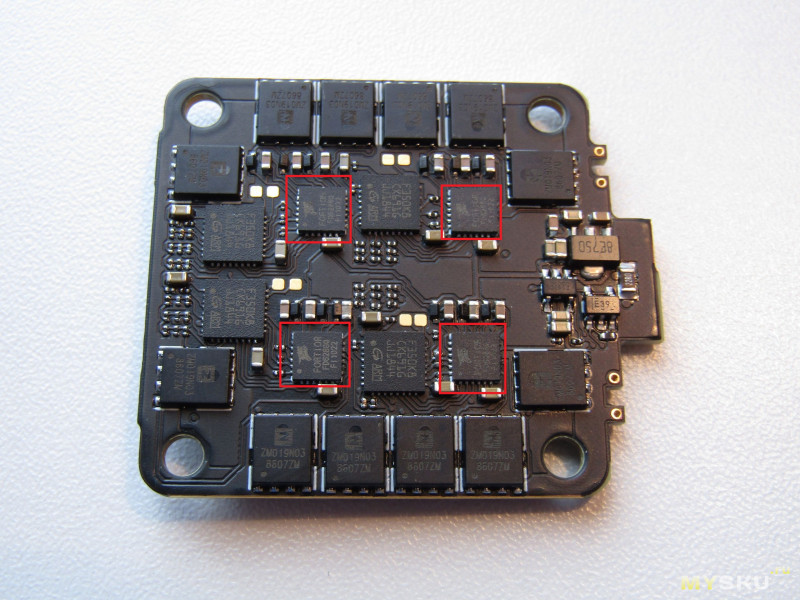
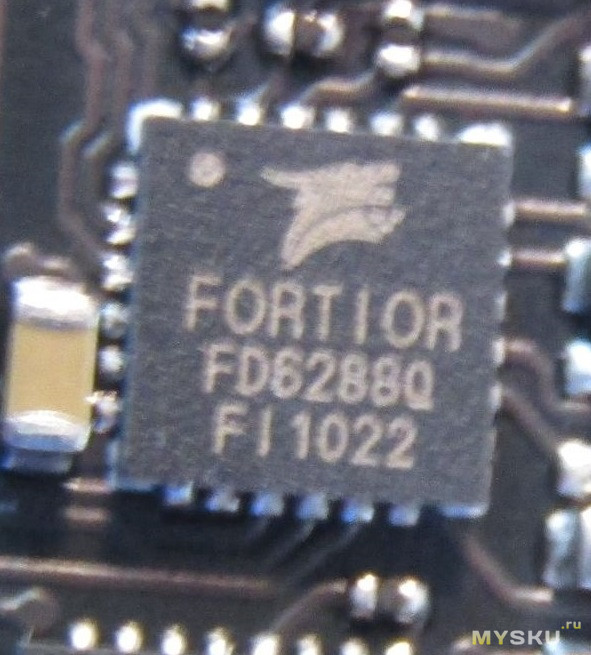
Драйвер ключей регулятора имеют маркировку — Fortior fd6288q
Под спойлером оставлю пару фотографий, что бы вы могли посмотреть и оценить для себя качество пайки и сборки. Флюс отмыт хорошо, следов не видно.
Установка
В целом тут мало что можно описать. Кому будет интересно чуть подробнее распишу под спойлером.
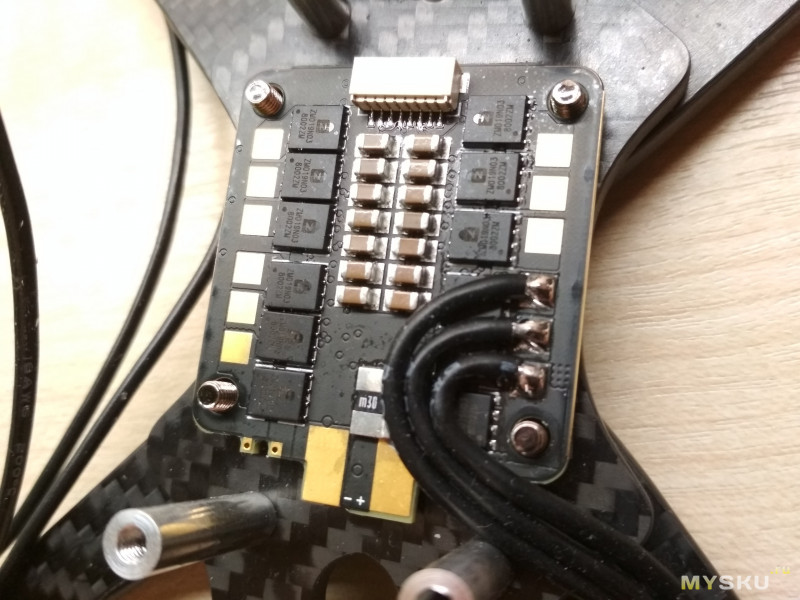
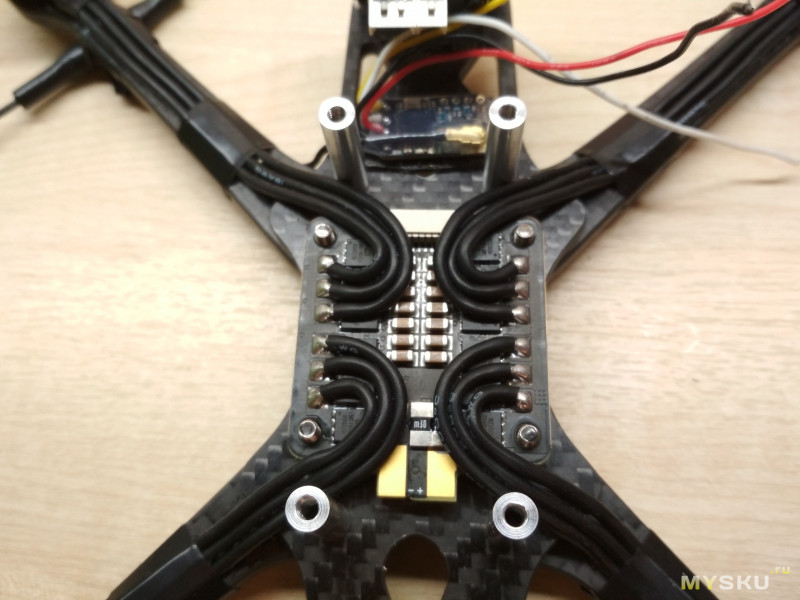
После пайки выглядит вот так. Теперь с установкой думаю можно завершить.
Настройка регуляторов
Подробную информацию размещу под спойлером.
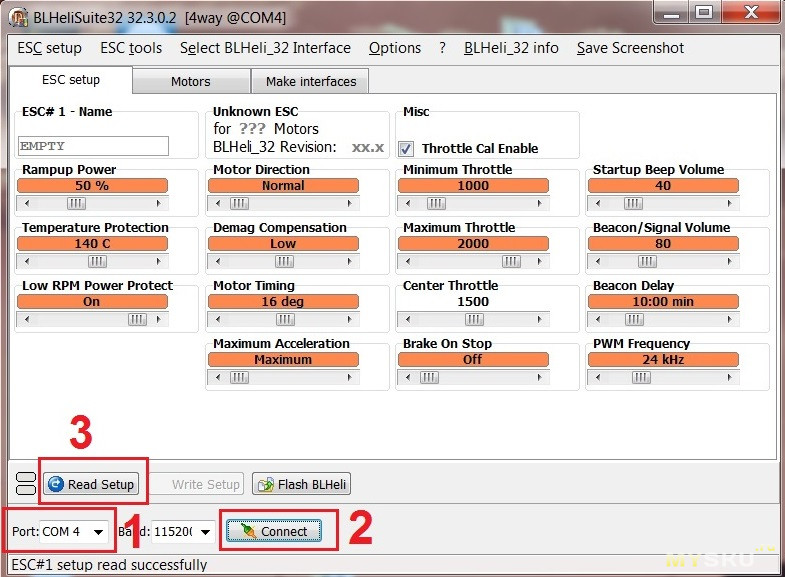
После всех манипуляций, подключаем мозг к компьютеру, и подсоединяем батарейку к квадрокоптеру. В окне выбираем нужный нам com port и жмём connect.Для того что бы прочитать настройки регуляторов жмём Read setup.
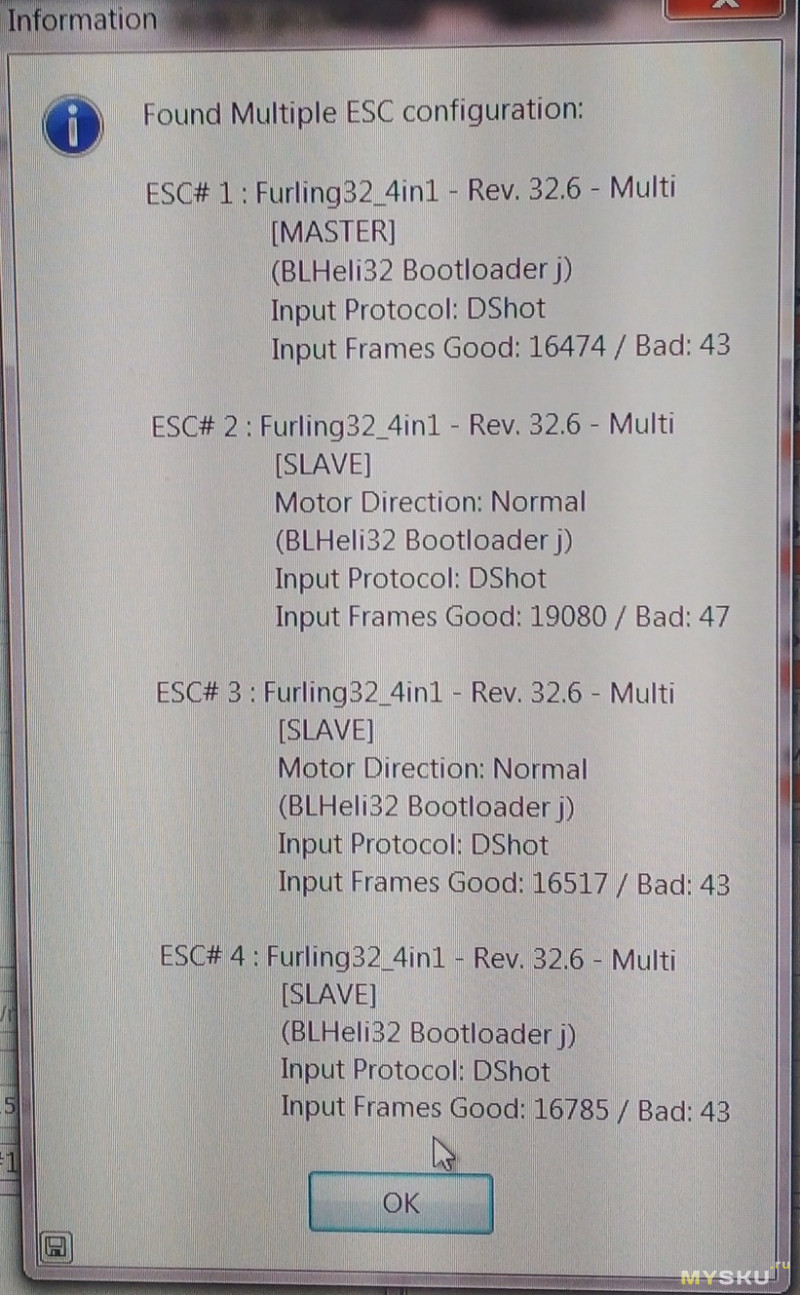
Регулятор определяется как Furling32_4in1, прошивка версии 32.6.
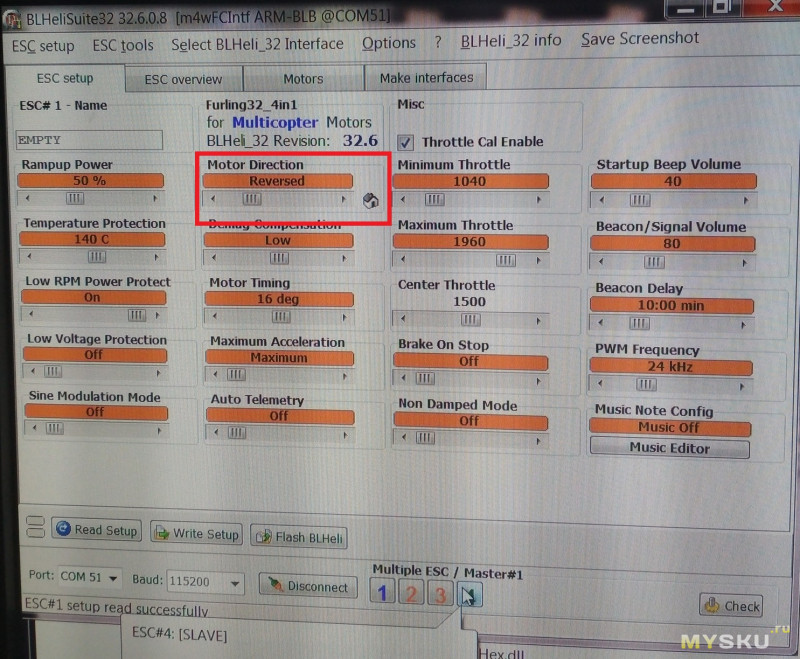
Если какой то из ваших мотор вращается не правильно, то просто выберете данный регулятор и можете в его настройках изменить вращение.
Из интересного тут пока что ничего не появилось. Освещу дополнительно стандартные пункты, что бы вам не пришлось искать где то их.
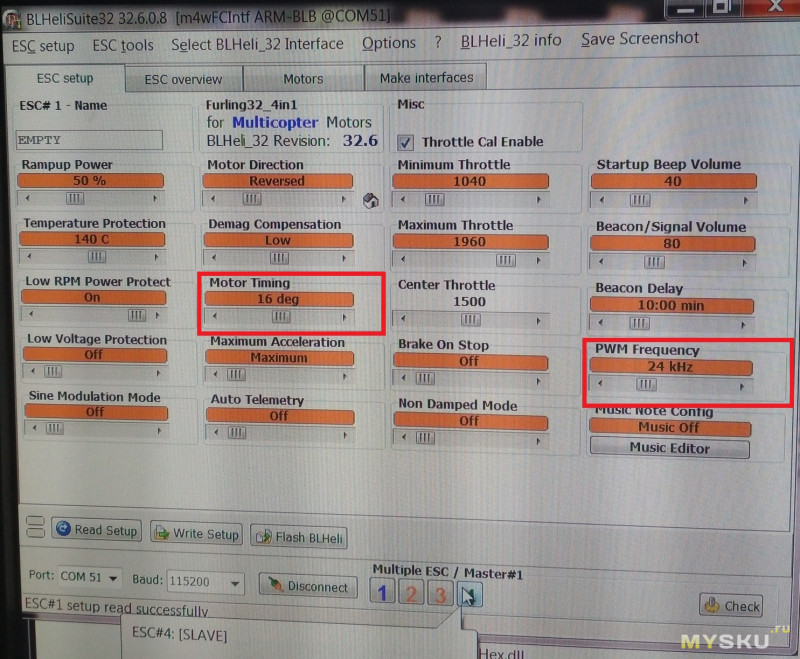
Два пункта которые влияют на плавность и мощность.
1) Motor Timing, этот параметр позволяет расширить диапазон газа. Рекомендуется выставить автоматический режим, тогда теоретически нам будет доступно более максимальное значение газа. Я не стал трогать этот параметр, так как при увеличении мощность пойдёт и большой нагрев и т.д., а мне жалко моторы и регуляторы, по этому я оставил стандартные значения.
2) PWM Frequency, грубо говоря чем выше значение тем плавнее будут крутиться моторы. Для себя я поставил значение 40, так как мне показалось это оптимальным, достаточно плавно, но при этом нету эффекта как будто летишь в масле.
Пару слов о прошивке. Для неё есть одно требование, это наличие интернета, без интернета прошивка не пойдет, так как запрос отправляется на сервер и проверяется подлинность ПО в регуляторах.
1) Нажимаем Flash BLHelli
2) Выбираем версию прошивки
3) Нажимаем ОК
Полётный тест
Со своей задачей регулятор справляется более чем. Резкие перегазовки, манёвры отрабатывает на ура. Ни каких сбоев или глюков замечено не было. Конечно со временем все может проявится, но пока что ничего не глючит и все работает.
Под спойлером можете найти видео полёта и оценить его сделав для себя выводы.
Регулятор оборотов — Furling32 4in1
Полётный контроллер — Foxeer f722 dual
Пропеллеры -Pink HQ5x4.3×3 Props
Аккумулятор — ONBO 1300mAh 4S 120C Lipo
Курсовая камера — Foxeer PredatorV3 Micro
Видеопередатчик — ImmersionRC Tramp HV
Антенна видеопередатчика — FOXEER Lollipop 2
Аппаратура управления — Frsky Taranis X9D с TBS Crossfire
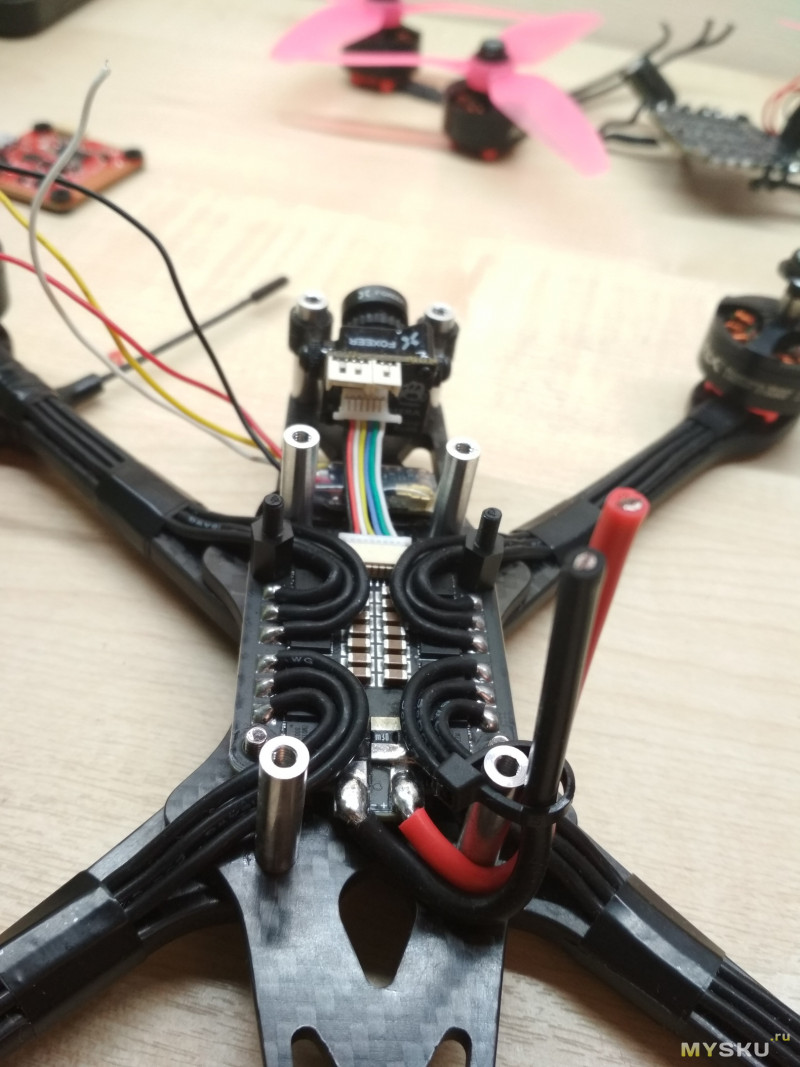
В собранном состоянии выглядит вот так.

Краткий вывод
Я надеюсь, что после прочтения данной статьи вы сможете спокойно ответить на вопросы которые были в самом начале. Нужен или нет такой регулятор решать исключительно вам, данный обзор просто рассказывает о регуляторе оборотов, а выбор остается уже за каждым индивидуально. По фактам регулятор работает, отказов пока не было, свои задачи выполняет.
Спасибо всем кто дочитал до конца!)
Товар предоставлен для написания обзора магазином. Обзор опубликован в соответствии с п.18 Правил сайта.
(c) 2017 Источник материала