

- Цена: $89
Я также просматривал материалы по этому дрону в интернете и зачастую люди вопрошали в комментариях, как настроить Scratch, чтобы можно было управлять квадрокоптером прямо с компьютера и программировать трюки. Этот момент я также раскрою пошагово в этом обзоре.
Технические характеристики
Особенности: настраиваемые режимы полёта
Количество винтов: 4
Канал управления: WiFi 802.11n 2.4G
Поддерживаемые OS: Android/iOS
Камера: 5Мп, угол обзора 82.6°
Запись видео: 720p@30FPS
Стабилизация видео: цифровая
Cкорость полета: до 8 м/c
Время полета: до 13 мин
Радиус действия: 100 м
Датчики: высоты, гироскоп, дальномер, барометр
Процессор: 14-ядерный Intel Movidius Myriad 2
Аккумулятор: Li-ion 1100mAh
Вес (без АКБ): 80гр.
Внешний вид
Дрон упакован в чёрно-оранжевую коробку с прозрачной передней стороной из блистера. Коробку почта изрядно помяла во время доставки, что слегка огорчило. На задней стороне коробки указаны характеристики и отмечено участие Intel при разработке этого квадрокоптера.


Однако, к счастью, сам дрон не пострадал, поскольку он дополнительно облачён в более жёсткий каркас из блистера.

К слову, если отсутствует отдельная сумка на молнии для хранения квадрокоптера, то можно использовать блистер из упаковки и таскать его например в рюкзаке без опаски, что он поломается.
Комплектация такова:
— квадрокоптер
— аккумулятор
— 4 запасных лопастей
— ключ для снятия лопастей
— пакетик с силикагелем для вытяжки влаги
— брошюра на китайском языке

брошюра на непонятном китайском языке
Запасные лопасти и ключ

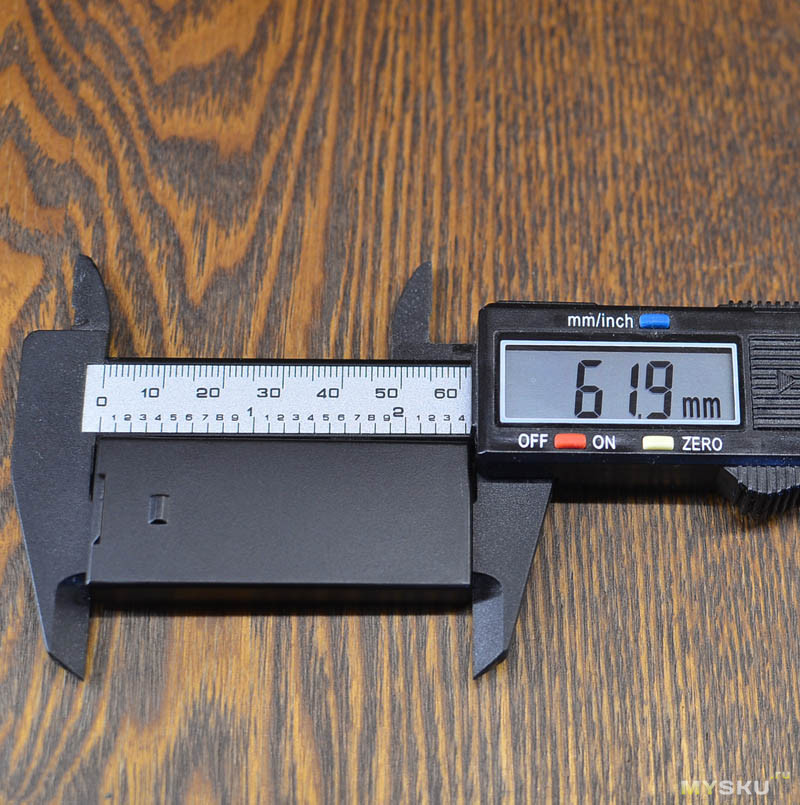
Длина одной такой чуть более 73мм

Комплектный аккумулятор литий-ионный, ёмкостью 1100мАч, его вес чуть более 26г





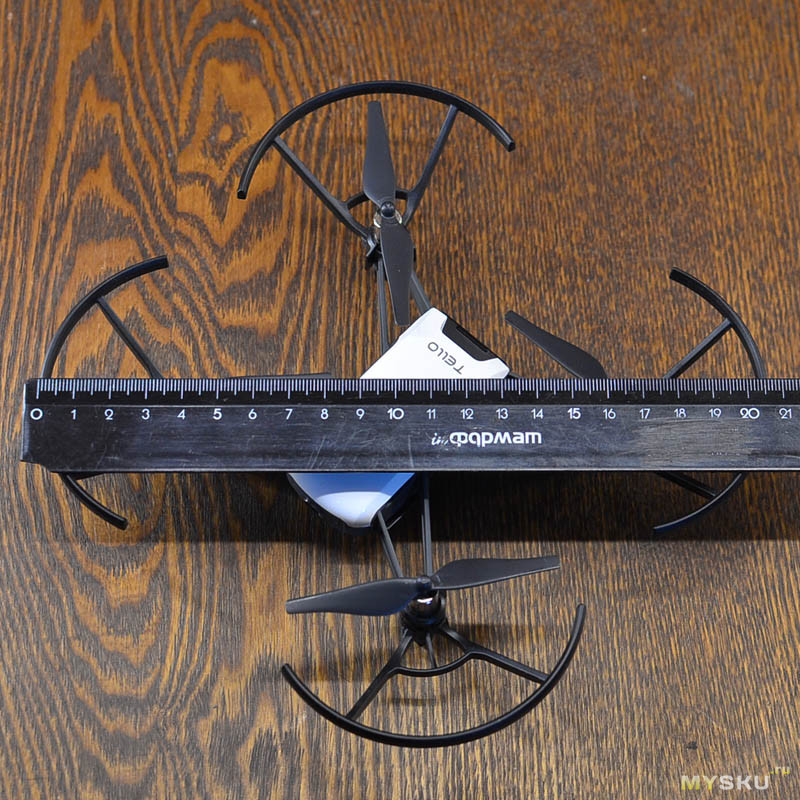
Собственно, сам летательный аппарат

Визуально довольно небольших размеров и очень лёгкий. Сначала опасался, что такой тонкий пластик, из которого сделан дрон, будет хрупким, однако на самом деле он оказался весьма крепким и прочным

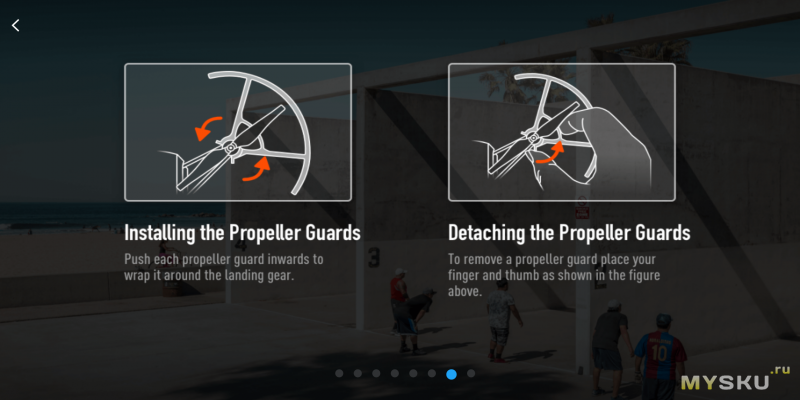
Квадрокоптер 4-винтовой, у каждого винта закреплён бампер, который при желании можно снять. Моторы коллекторные, поэтому особо изысканным RC’шникам эта модель будет не интересна.

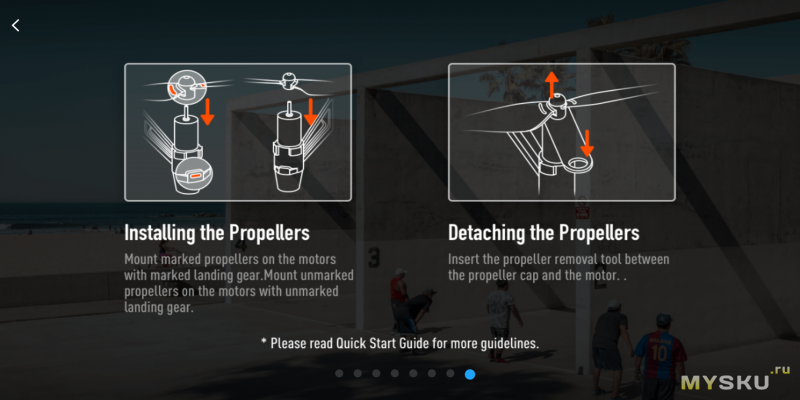
Лопасти не все одинаковые, они установлены парами крест-накрест, т.е. если присмотреться, то на одних винтах есть риски, на других их нет.



На лицевой стороне виден глазок утопленной камеры для фото- и видео-съёмки. Чуть правее индикаторный разноцветный светодиод. Заявленное разрешение 5Мп c углом обзора 82.6°, при этом запись видео ведётся в разрешении 1280х720 точек. Оптической стабилизации нет, зато есть цифровая стабилизация за счёт компенсации оставшихся мегапикселей при записи 720р видео.



С боковой стороны размещена кнопка включения дрона. Производитель старался максимально уменьшить общий вес дрона, поэтому в конструкции везде, где только можно, проделаны отверстия.

С другой боковой стороны расположен microUSB-разъём для подключения зарядки

С задней стороны виден отсек под аккумулятор

Белая глянцевая верхушка корпуса — съёмная, крепится за защёлках, почти невесомая. В продаже продаются крышки других цветов на выбор.
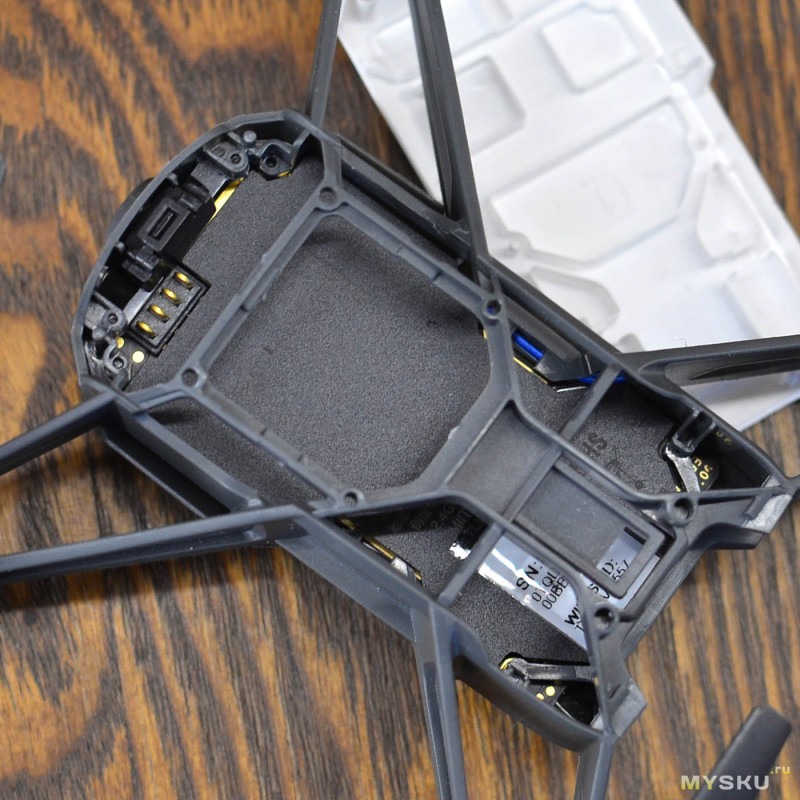
Контакты под аккумулятор

В состоянии покоя дрон опирается на ножки из жёсткой резины, которые расположены под каждым из четырёх двигателей


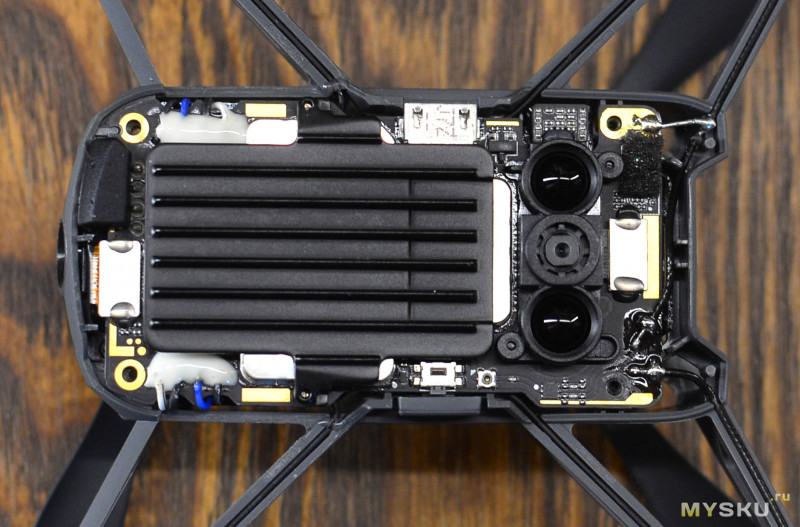
На обратной стороне дрона расположены датчики положения в пространстве

Причём средний из них — камера

Провода от тушки дрона к двигателям идут вдоль желобков на каркасе

Размеры дрона, с учётом бамперов — 20.7мм
Тушка — 70 х 34.3 мм
Высота (от центральной оси лопасти до резиновой ножки) — 40.8мм
Общий вес дрона (АКБ + 4 бампера + белая крышка) — 88.66гр



Теперь можно впихнуть аккумулятор до упора, включить дрон и приступить к знакомству с софтверной частью
В смартфоне тем временем необходимо найти WiFi-сеть с названием TELLO, подключиться к ней и запустить приложение Tello, которое можно скачать с PlayMarket’a:

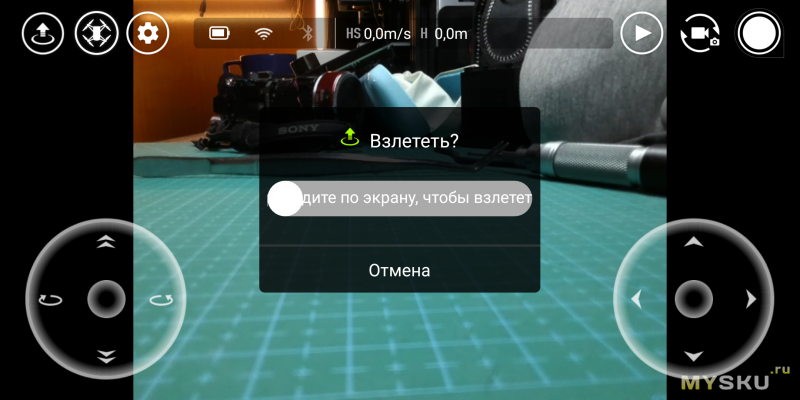
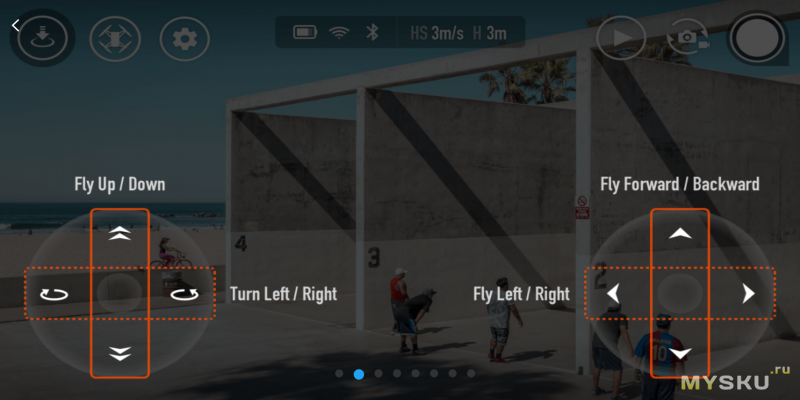
Это главное окно программы. Когда связь между дроном и смартфоном установлена, то автоматически выведется изображение с его камеры в реальном времени, т.е. экран смартфона сейчас выступает в роли видоискателя.
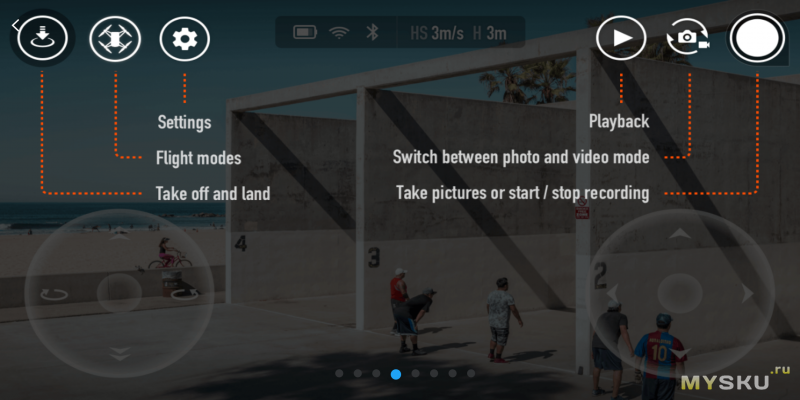
Исследуем верхнюю панель инструментов, совмещённую со статус-баром.
Левая тройка значков:
— Слева (стрелка, указывающая вверх из кружка) — дать команду взлететь
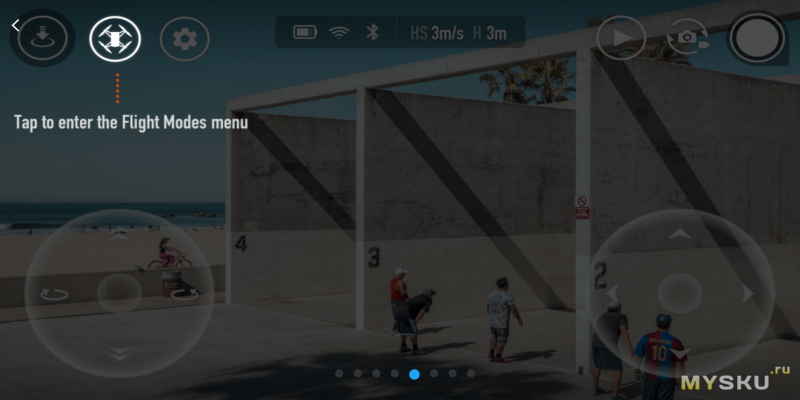
— Средний (символ дрона) — команда на выполнение какого-либо трюка из списка на выбор
— Справа (шестерёнка) — перейти в настройки
Правая тройка значков:
— Слева (треугольник PLAY) — перейти в галерею к отснятым материалам
— Средний (символ видео-, фото-камеры в кружке) — переключится в режим фото-, или видео-съёмки
— Справа (сплошной кружок) — кнопка спуска затвора фото-камеры, либо начала/остановки записи видео
Статус-бар посередине (слева-направо):
— Уровень заряда аккумулятора
— Уровень WiFi-сети
— Активность Bluetooth
— Скорость полёта в м/с
— Высота в метрах

Взлёт по нажатию на кнопку оснащён дополнительной защитой от случайного нажатия, где требуется в качестве подтверждения действия провести пальцем по экрану. И это правильно.
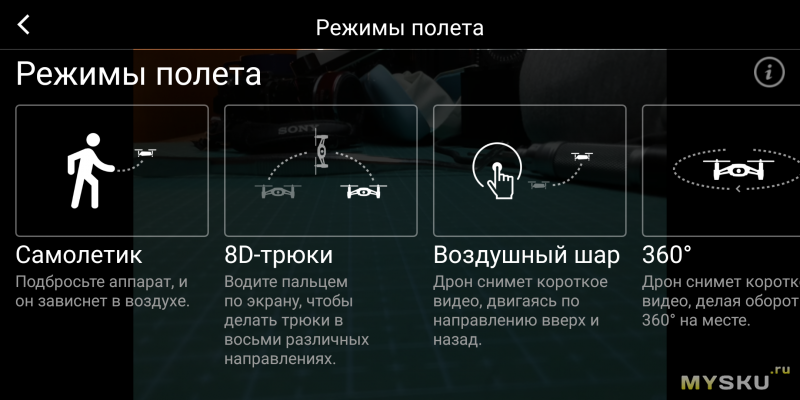
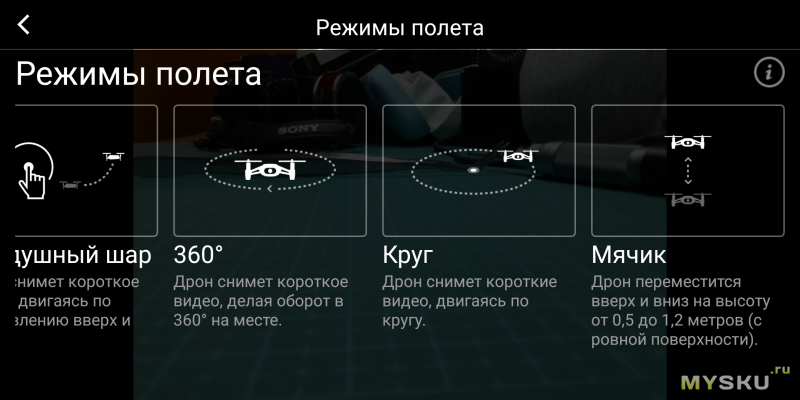
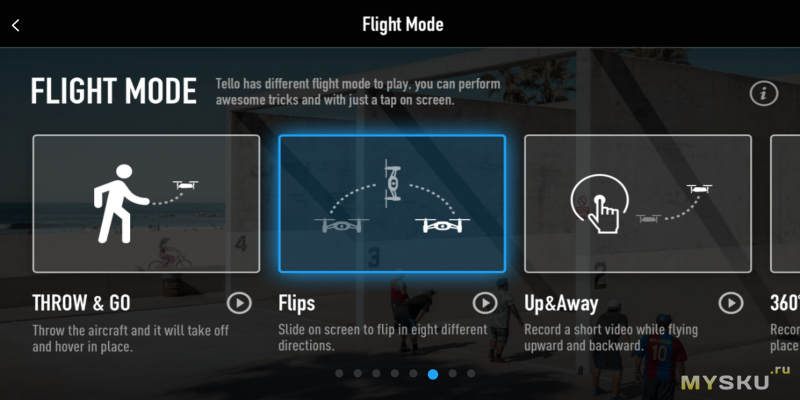
Трюков доступно 6 штук на выбор, на скриншотах русским по тёмному даны описания каждого.
Поскольку соотношение сторон картинки при записи видео и фото — различается, то и отображение картинки меняется соответственно.
Настройки. Здесь можно выбрать режим полёта, быстрый (Fast) или медленный (Slow), не рекомендуется в квартире использовать первый, т.к. квадрокоптер движется в этом режиме очень быстро и легко угодить в «аварию».
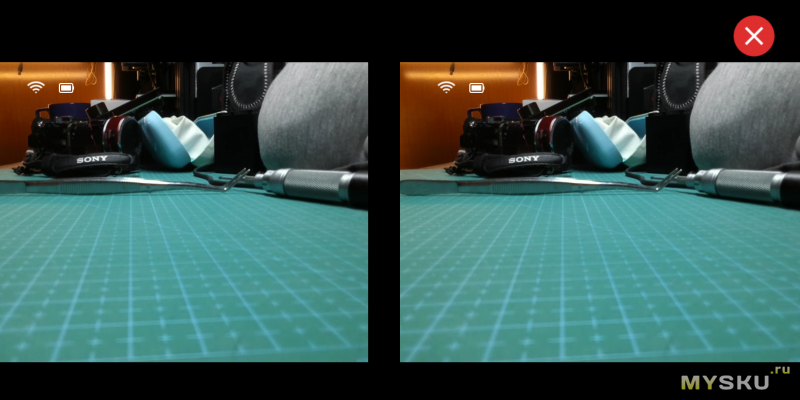
Режим VR, при котором картинка разделяется на 2 части и смартфон можно вложить в VR-очки.
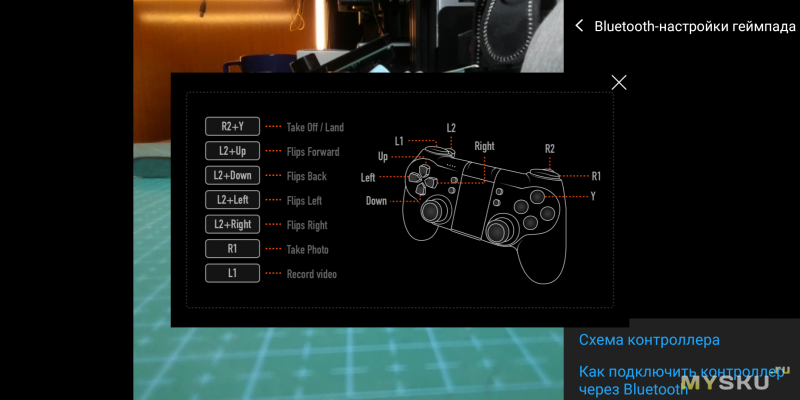
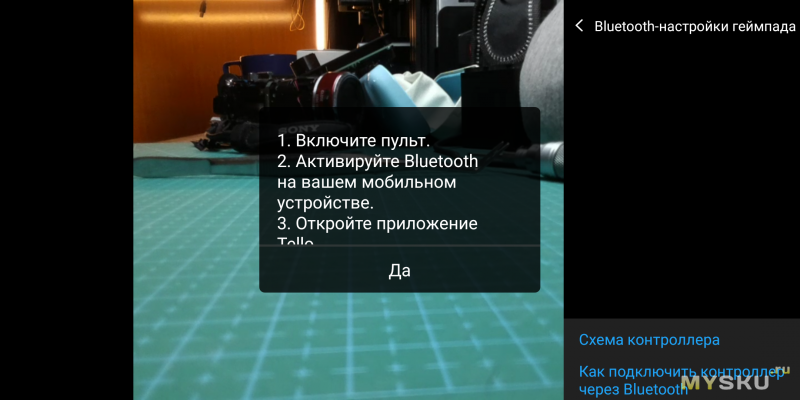
Настройки Bluetooth-геймпада, где можно переназначить клавиви, либо посмотреть текущую схему раскладки.
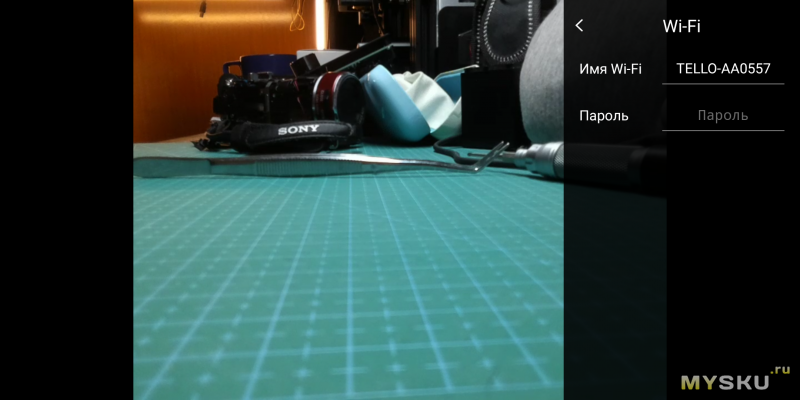
В WiFI есть возможность установить свой пароль.
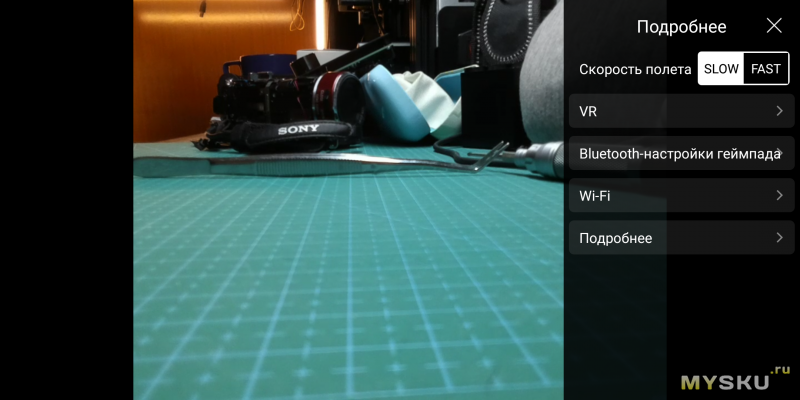
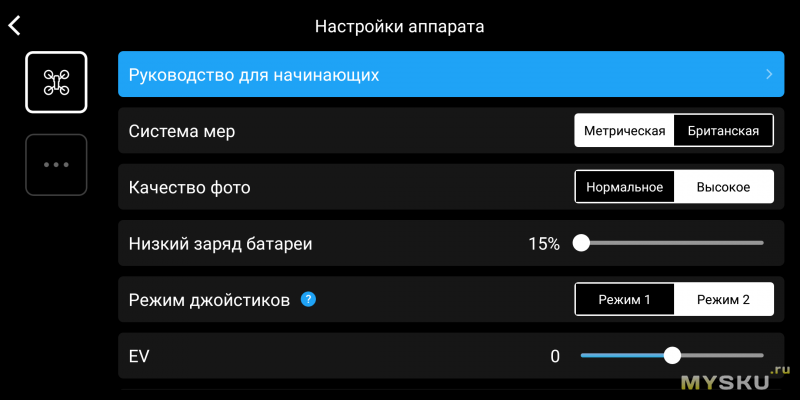
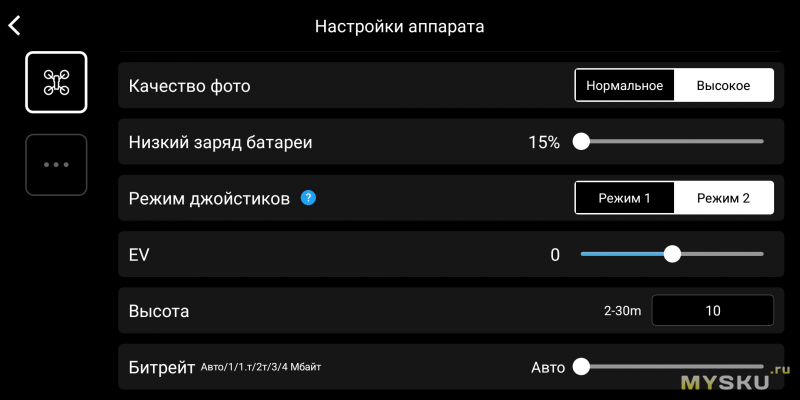
Подробнее — более глубокие настройки. Две вкладки. Сейчас осматриваем вкладку со значком квадрокоптера. Здесь задаются система мер, качество фото, экспозиция, битрейт видео, режим джойстиков, порог оповещения о разряде аккумулятора и ограничение на высоту (от 2-х до 30 метров).
Руководство для начинающих помогает разобраться с настройками, управлением и даёт напутствия по обслуживанию.


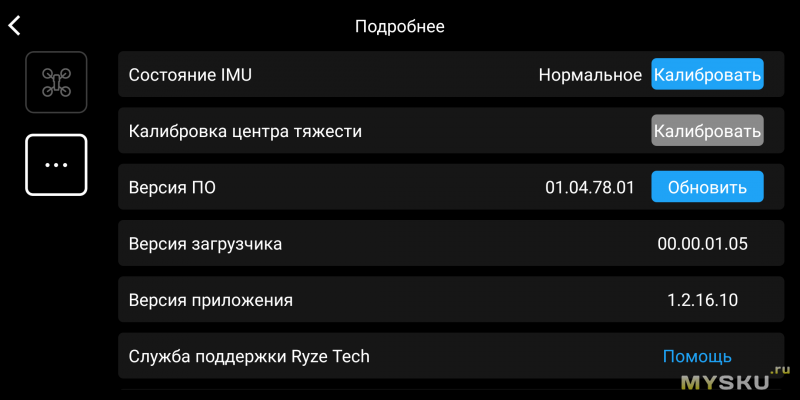
Вкладка настроек с тремя точками позволяет откалибровать дрон и обновить на нём прошивку.
Программирование
Квадрокоптером можно управлять напрямую с компьютера. В данном случае я буду это делать с моего ноутбука под управлением Windows 7. Инструкция, по которой я ориентировался, мягко говоря, не полная и новичёк здесь не разберётся. Но переживать не стоит, поскольку я дополню порядок установки и настройки прямо здесь.
1) Сперва необходимо скачать Scratch Offline Editor 2.0, затем установить.
2) Скачать и установить Node.JS
3) Скачать скрипты Scratch.zip
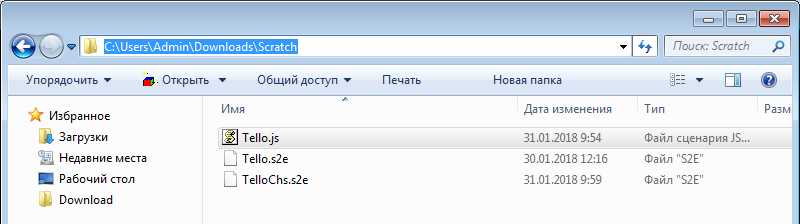
4) Содержимое архива Scratch.zip распаковал в папку Downloads, поэтому общий путь выглядит, как:
C:UsersAdminDownloadsScratch
Примечание. Admin — название компьютера, у вас оно может быть другим
5.1) Запустить командную строку (Пуск -> ввести внизу CMD), откроется окно:
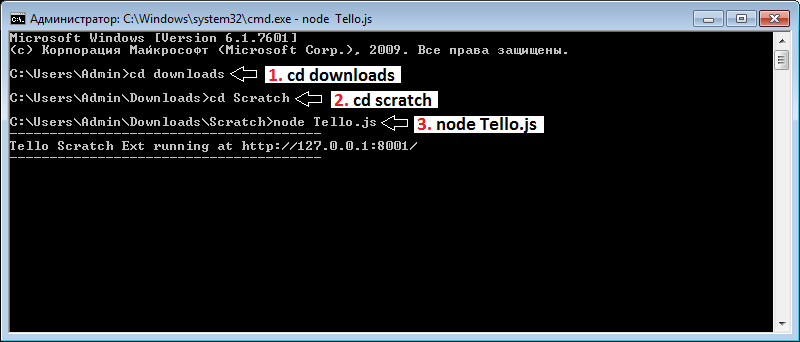
5.2) Ввести строку cd downloads, нажать Enter
5.3) Ввести строку cd Scratch, нажать Enter
5.4) Ввести строку node Tello.js, нажать Enter
5.5) Появится такое окно, разрешаем доступ. Сеть выбрал домашнюю.
6.1) Запустить Scratch Offline Editor 2.0
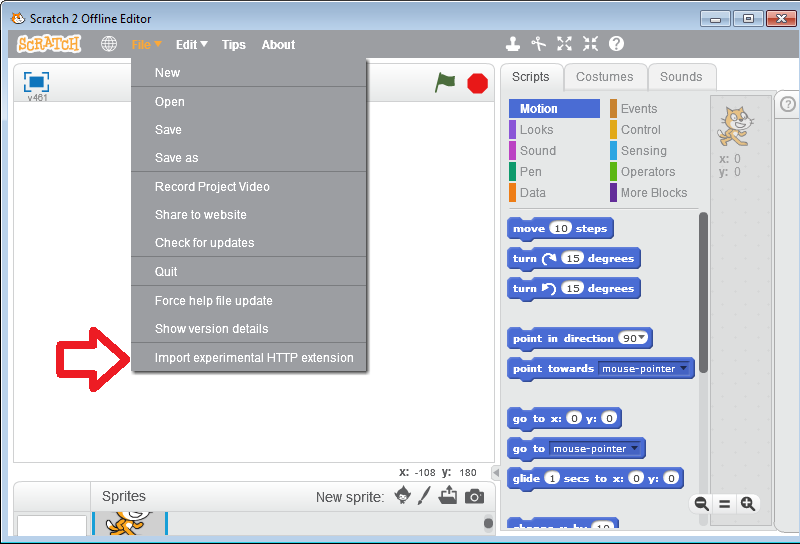
6.2) Удерживая клавишу Shift на клавиатуре, кликнуть мышью по пункту File на верхней панели инструментов программы. Из контекстного меню выбрать последний пункт: Import experimental HTTP extension
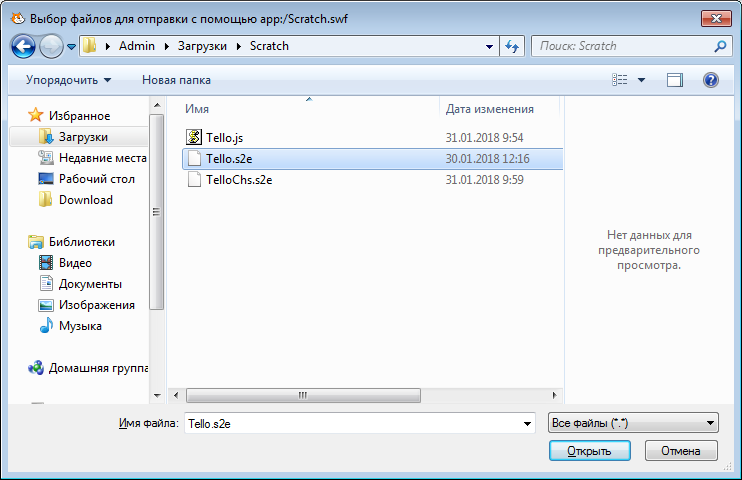
6.3) Найти и выбрать файл Tello.s2e
6.4) Включить дрон, на ноутбуке в доступных сетях WiFi появится Tello — подключиться к ней.
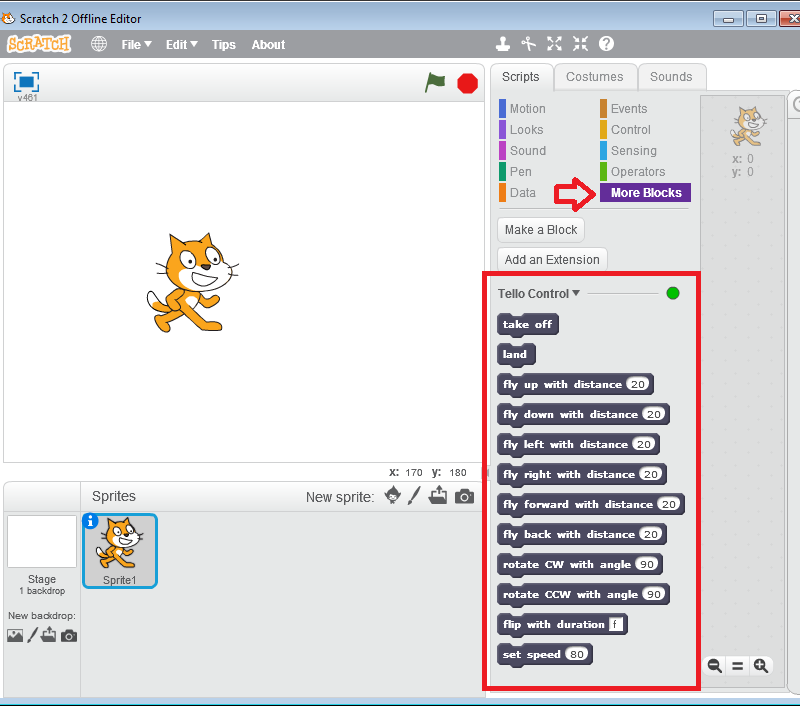
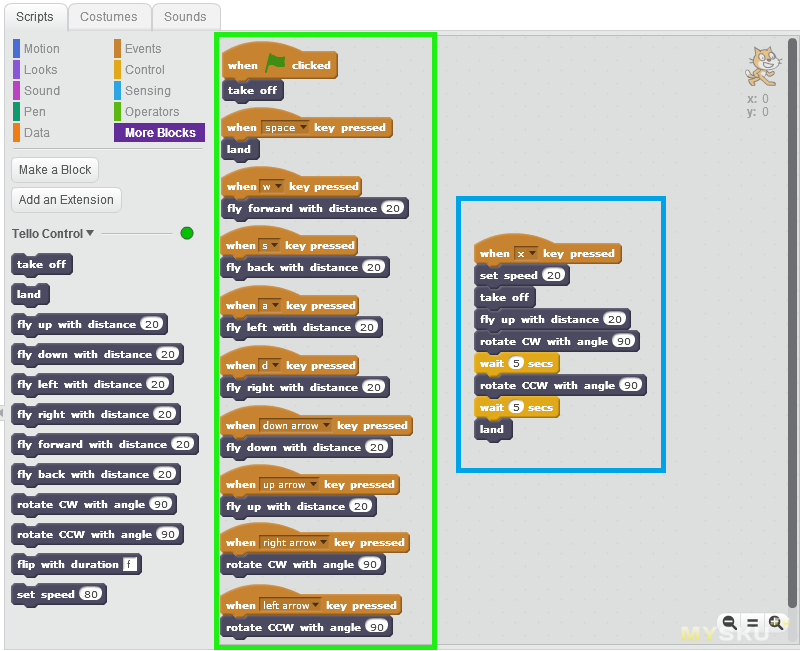
7.1) Можно заниматься сборкой и настройкой команд — именно так хочется назвать процедуру в этой среде, поскольку программирование по большому счёту визуальное или блочное. Переходим во вкладку More Blocks. в списке ниже отобразится список команд, которые доступны для управления дроном (красная рамка).
7.2) Попробуем составить наипростейший список комманд для передачи их на квадрокоптер. Делается это путём перетаскивания блоков в правую свободную часть экрана. В программировании важно соблюдать порядок описанных команд. Блоки с командами надо «налепить» друг на друга. При желании, прописав внутри блока величину (задержка в секундах или расстояние). Блоки с командами можно брать и из других вкладок, например оранжевый блок задержки в секундах с надписью wait из вкладки Control. Последовательность будет такова:
— take off — взлететь
— fly up with distance (20) — подняться на высоту 20
— wait (10s) — пауза(10с) / задержка(10с) / зависнуть в воздухе на 10 секунд
— land — приземлиться
Как это выглядит в «блочном» коде?
— после окончательной сборки команд, для запуска скрипта нужно дважды кликнуть по массиву блоков, и квадрокоптер начнёт выполнение заданных команд.
Это был простой пример. Но это как-то топорно и не очень удобно — каждый раз делать наброски блоков и выполнять их двойных кликом. Функционал можно сделать более гибким. Например, назначив определённое действие на горячую клавишу на клавиатуре ноутбука. Для этого переходим во вкладку Events, перетаскиваем оттуда блок When в правую область экрана.
Блок When выполняет какую-то прилепленную к нему команду, когда нажата определённая клавиша на клавиатуре. В данном случае горячей клавишей является Space, и действие, которое выполнится по её нажатию — Land — посадка квадрокоптера. Разумеется, это действие можно «повесить» и на другие клавиши, однако не забываем — чтобы команды по нажатию клавиш срабатывали, переключите язык в трее на английский.
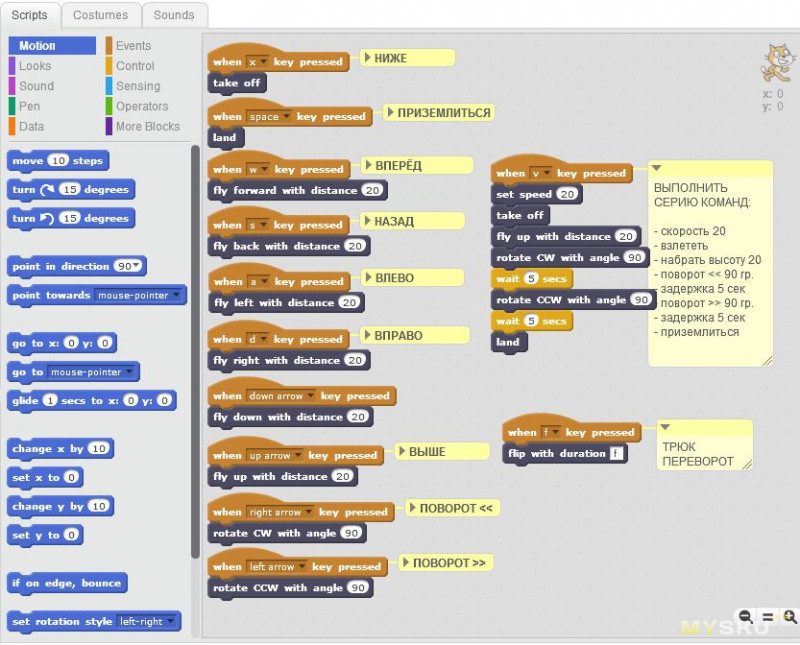
Теперь добавим ещё больше горячих клавиш и назначим им остальные действия и у нас получается столбик независимых (разделённых) друг от друга команд (обведены зелёной рамкой на скриншоте).
посадка - Space лететь вперёд, влево, назад, вправо - WASD лететь вверх и вниз - стрелочки (UP arrow, Down arrow) повернуть влево и вправо - стрелочки (Left arrow, Right arrow) взлёт сделал по клику на флажокНо это отнюдь не означает, что на одно нажатие можно назначить только одно действие. На горячую клавишу можно повесить серию каких-либо команд, как показано в синей рамке.
Составленные команды для удобства и наглядности можно закомментировать. Сперва создаётся пустой листинг через пункт контекстного меню …add comment, потом пишется текст. Комментарий можно оставить как есть, либо свернуть его. Листинг с комментарием посредством перетаскивания на заголовок блока, можно подвязать.
В деле
Квадрокоптер парит в воздухе, и удерживает при помощи оптических датчиков позицию. Если его толкнуть пальцем, он отклоняется, и затем возвращается в исходное положение.

Переворот дрона (один из трюков) в замедленном движении:

Посадка на руку:

Видео
Подвеса камеры, как такового — у этого дрона вообще нет, она просто встроена в корпус. Однако присутствует цифровая стабилизация изображения, которая на мой взгляд, работает достойно — большую часть времени изображение ровное. Но периодические подёргивания картинки всё-таки тоже дают о себе знать. Ближе к концу видео решил полетать в парке, где много деревьев, дрон угодил в ветки и три винта в итоге отлетело и потерялось, тушка же — застряла на дереве, пришлось конечно же потом качать дерево, чтобы дрон как-то упал вниз:) Что удивило, кроме винтов, ничего не пострадало абсолютно. Пластик, из которого сделана тушка дрона, действительно оказался хорошим и качественным, в чём убедился лично. Потом поставил запасные лопасти :)
Итоговая сводка
Автоматическая посадка.
GPS в дроне отсутствует, поэтому он не возвращается назад в точку возврата при потери сигнала WiFi, дрон автоматически приземляется. Это и хорошо и неприятно одновременно. Поскольку в момент посадки под ним может оказаться вода, либо иная непролазная и опасная поверхность. При полётах следует это иметь ввиду и мало-мальски проверять будущий «полигон» для полётов.
Автономность.
Во время тестов составила 11 мин (из заявленных 13 мин).
Двигатели.
Пожалуй, самай основный недостаток дрона — коллекторные моторы, которые в основном устанавливаются в недорогие квадрокоптеры, так как они считаются менее надёжными по сравнению с бесколлекторными моторами, однако это уже другая цена вопроса.
Устойчивость.
Дрон очень лёгкий, поэтому чувствителен к порывам ветра. В сумерках дрон плохо удерживает позицию, поскольку оптическим датчикам для ориентации не хватает освещённости.
Технические проблемы.
В устройстве установлен мощный процессор, но при этом в весьма компактном корпусе.
Если квадрокоптер синхронизировать со смартфоном и оставить его в состоянии покоя, то через несколько минут на экране появится сообщение о перегреве дрона с последующим самопроизвольным выключением. Судя по отзывам других владельцев DJ Tello, проблема довольно распространена. Перегрев Intel’овского чипсета признают и в самой поддержке, однако решений не предлагается. Перегрев с внезапным выключением может быть опасен во время процесса обновления прошивки дрона, поэтому рекомендуется в этот момент ставить квадрокоптер на вентилятор для охлаждения нижней части. Способ проверенный и рабочий. Во время непосредственно полётов дрон охлаждается, поэтому перегрева не происходит.
Съёмка и способ записи.
Внутри квадрокоптера отсутствует слот под microSD-карты памяти и изображение может только транслироваться на смартфон. Ситуация двоякая. С одной стороны, это периодические подлагивания — изображение во время полётов передаётся с некоторыми рывками, и записанное видео получается иногда дёрганным. В этом случае приходится понижать битрейт видео в настройках, жертвуя качеством картинки. С другой стороны, передавая картинку напрямую пользователю, DJ Tello не хранит в себе отснятый материал. В некоторых специфичных ситуациях это несомненный плюс в виде спокойствия, когда аппарат неожиданно угодил не в те руки.
Качество записи.
Камера умеет делать как фото, так и видео. Качество съёмки сильно зависит от освещения — чем ярче, тем и качество лучше. Но даже при небольших сумерках появляются цифровые шумы на изображении — сказывается невысокая светосила объектива у встроенной камеры, от чего программный алгоритм завышает ISO.
Поддержка.
С некоторой периодичностью разработчики выпускают обновления для квадрокоптера. Факт приятен. Интересно, сколько по времени будет продолжаться эта поддержка.

Дальнобойность связи.
Несмотря на заявленные 100 метров (до 10 метров в высоту) на ровной, без помех, местности, реальная дистанция связи оказалась около 30 метров. Немного. Однако, дальнобойность можно увеличить дополнительными устройствами. Решается это за счёт усилителей WiFi, расширяющих диапазон, например Xiaomi Amplifier 2 (цена вопроса до $10), подключённым к повербанку. Единственная временная сложность — в первоначальной настройке сети.
Назначение.
Учитывая хорошую сборку и крепкий корпус, возможность использовать с VR-очками и Bluetooth-гейпадом, подойдёт для начинающих, для понятия основ пилотирования квадрокоптерами. Помимо прочего, предусмотрена защита от внезапных столкновений — автоматически выключаются двигатели.
Надеюсь, материал оказался полезен.
Товар предоставлен для написания обзора магазином. Обзор опубликован в соответствии с п.18 Правил сайта.
(c) 2017 Источник материала